Chapter: Mechanical : Metrology and Measurements : Concepts of Measurement
Static and Dynamic Response
STATIC AND DYNAMIC
RESPONSE
The static characteristics of measuring
instruments are concerned only with the steady-state reading that the
instrument settles down to, such as accuracy of the reading.
The dynamic characteristics of a
measuring instrument describe its behavior between the time a measured quantity
changes value and the time when the instrument output attains a steady value in
response. As with static characteristics, any values for dynamic
characteristics quoted in instrument data sheets only apply when the instrument
is used under specified environmental conditions. Outside these calibration
conditions, some variation in the dynamic parameters can be expected.
In
any linear, time-invariant measuring system, the following general relation can
be written between input and output for time (t) > 0:

where
qi is the measured quantity, qo is the output reading, and ao
...an, bo... bm are constants. If we limit
consideration to that of step changes in the measured quantity only, then
Equation (2) reduces to

Zero-Order Instrument

If
all the coefficients a1 . . . an other than a0
in Equation (2) are assumed zero, then where K is a constant known as
the instrument sensitivity as defined earlier. Any instrument that behaves
according to Equation (3) is said to be of a zero-order type. Following a step
change in the measured quantity at time t, the instrument output moves
immediately to a new value at the same time instant t, as shown in Figure. A
potentiometer, which measures motion is
a good example of such an instrument, where the output voltage changes instantaneously
as the slider is displaced along the potentiometer track.
First-Order Instrument
If all the coefficients a2 . . . an except for ao
and a1 are assumed zero in Equation (2) then
Any instrument that behaves according to Equation
(4) is known as a first-order instrument. If d/dt is replaced by the D operator
in Equation (4), we get
Defining K ¼ b0/a0 as the
static sensitivity and t ¼ a1/a0 as the time constant of
the system,
Equation (5) becomes
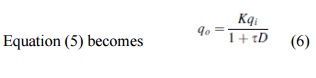
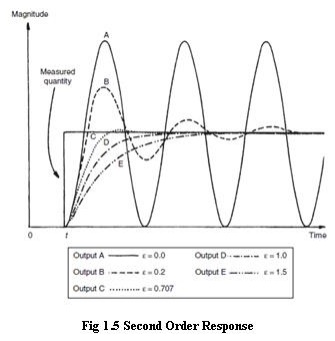
Second-Order Instrument
If all coefficients a3 . . . other than a0,
a1, and a2 in Equation (2) are assumed zero, then we get
This is the standard
equation for a second-order system, and any instrument whose response can be
described by it is known as a second-order instrument. If Equation (9) is
solved analytically, the shape of the step response obtained depends on the
value of the damping ratio parameter x. The output responses of a second-order
instrument for various values of x following a step changein the value of the
measured quantity at time t are shown in Figure.
Commercial second-order instruments, of which the accelerometer is a common
example, are generally designed to have a damping ratio (x) somewhere in the
range of 0.6–0.8.
Related Topics