Chapter: Operating Systems : Process Scheduling and Synchronization
Semaphores
SEMAPHORES
ü A more
robust alternative to simple mutexes is to use semaphores, which
are integer variables for which only two (atomic ) operations are defined, the
wait and signal operations, as shown in the following figure.
ü Note that
not only must the variable-changing steps ( S-- and S++ ) be indivisible, it is
also necessary that for the wait operation when the test proves false that
there be no interruptions before S gets decremented. It IS okay, however,forthebusylooptobe interruptedwhenthetesistrue,which
prevents the system from hanging forever.

1. Semaphore Usage
ü In
practice, semaphores can take on one of two forms:
o
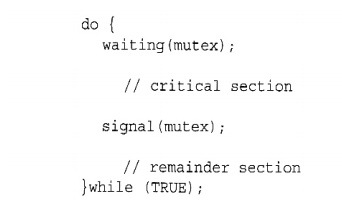
Binary semaphores can take
on one of two values, 0 or 1. They can be used to solve the critical
section problem as described above, and can be used as mutexes on systems that
do not provide a separate mutex mechanism.. The use of mutexes for this purpose
is shown in Figure below.
ü Semaphores
can also be used to synchronize certain operations between processes. For
example, suppose it is important that process P1 execute statement S1 before
process P2 executes statement S2.
ü First we
create a semaphore named synch that is shared by the two processes, and
initialize it to zero.
Then in process P1 we insert the code:
S1;
signal(
synch );
and in
process P2 we insert the code:
wait( synch ); S2;
Because synch was initialized to 0, process P2 will block on
the wait until after P1 executes the call to signal.
2. Semaphore
Implementation
ü The big
problem with semaphores as described above is the busy loop in the wait call,
which consumes CPU cycles without doing any useful work. This type of lock is
known as a spinlock, because the lock just sits there and spins
while it waits. While this is generally a bad thing, it does have the advantage
of not invoking context switches, and so it is sometimes used in
multi-processing systems when the wait time is expected to be short - One
thread spins on one processor while another completes their critical section on
another processor.
ü An
alternative approach is to block a process when it is forced to wait for an
available semaphore, and swap it out of the CPU. In this implementation each
semaphore needs to maintain a list of processes that are blocked waiting for
it, so that one of the processes can be woken up and swapped back in when the
semaphore becomes available. (Whether it gets swapped back into the CPU
immediately or whether it needs to hang out in the ready queue for a while is a
scheduling problem.)
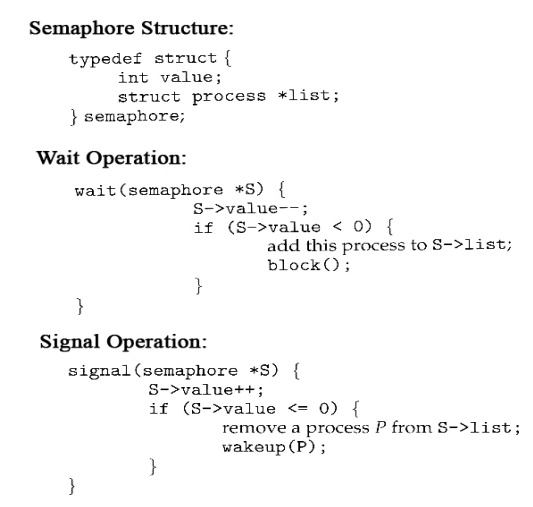
ü The new
definition of a semaphore and the corresponding wait and signal operations are
shown as follows:
3. Deadlocks and
Starvation
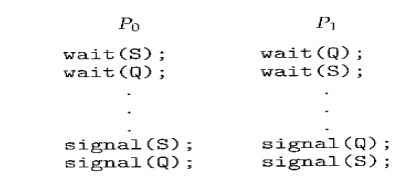
One important problem that can arise when using semaphores to
block processes waiting for a limited resource is the problem of deadlocks,
which occur when multiple processes are blocked, each waiting for a resource
that can only be freed by one of the other ( blocked ) processes, as
illustrated in the following example.
ü Another problem to consider is
that of starvation, in which one or more processes gets blocked forever, and never get a chance to take their turn in
the critical section. For example, in the semaphores above, we did not specify
the algorithms for adding processes to the waiting queue in the semaphore in
the wait( ) call, or selecting one to be removed from the queue in the signal(
) call. If the method chosen is a FIFO queue, then every process will
eventually get their turn, but if a LIFO queue is implemented instead, then the
first process to start waiting could starve.
Related Topics