Chapter: Operating Systems : Process Scheduling and Synchronization
Deadlock
DEADLOCK
Definition: A process
requests resources. If the resources are not available at that time ,the process
enters a wait state. Waiting processes may never change state again because the
resources they have requested are held by other waiting processes. This
situation is called a deadlock.
A process
must request a resource before using
it, and must release resource after
using it.
1. Request: If the
request cannot be granted immediately then the requesting process must
wait until it can acquire the resource.
2. Use: The
process can operate on the resource
3. Release: The
process releases the resource.
1. Deadlock Characterization
Four Necessary conditions for a deadlock
1. Mutual
exclusion: At least one resource must be held in a non
sharable mode. That is only one process at a time can use the resource.
If another process requests that resource, the requesting process must be
delayed until the resource has been released.
2. Hold and
wait: A process must be holding at least one resource and waiting to
acquire additional resources that are currently being held by other
processes.
3. No
preemption: Resources cannot be preempted.
4. Circular
wait: P0 is waiting for a resource that is held by P1, P1 is waiting
for a resource that is held by P2...Pn-1.
2. Resource-Allocation Graph
It is a
Directed Graph with a set of vertices V
and set of edges E.
V is
partitioned into two types:
ü nodes P =
{p1, p2,..pn}
ü Resource
type R ={R1,R2,...Rm}
Pi -->Rj - request => request edge
Rj-->Pi - allocated => assignment edge. Pi is denoted as a circle and Rj as a square.
Rj may have more than one instance represented as a dot with
in the square.
Sets P,R
and E. P = {P1,P2,P3} R = {R1,R2,R3,R4}
E= {P1->R1, P2->R3,
R1->P2, R2->P1, R3->P3 }
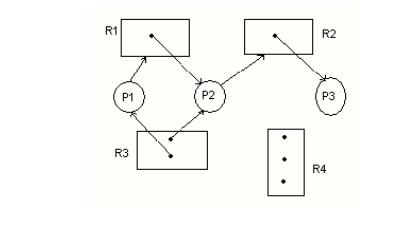
Resource
instances
One instance of resource type
R1,Two instance of resource type R2,One instance of resource type R3,Three
instances of resource type R4.
Process states
Process P1 is holding an instance
of resource type R2, and is waiting for an instance of resource type
R1.Resource Allocation Graph with a deadlock
Process P2 is holding an instance
of R1 and R2 and is waiting for an instance of resource type R3.Process P3 is
holding an instance of R3.
P1->R1->P2->R3->P3->R2->P1
P2->R3->P3->R2->P2
Methods for handling Deadlocks
ü
Deadlock Prevention
ü
Deadlock Avoidance
ü
Deadlock Detection and Recovery
3.
Deadlock Prevention:
v This ensures that the
system never enters the deadlock state.
v Deadlock
prevention is a set of methods for ensuring that at least one of the necessary
conditions cannot hold.
v By
ensuring that at least one of these conditions cannot hold, we can prevent the
occurrence of a deadlock.
Denying Mutual exclusion
§ Mutual
exclusion condition must hold for non-sharable resources.
§ Printer
cannot be shared simultaneously shared by prevent processes.
§ sharable
resource - example Read-only files.
If
several processes attempt to open a read-only file at the same time, they can
be granted simultaneous access to the file.
A process
never needs to wait for a sharable resource.
Denying Hold and wait
o Whenever a process requests a
resource, it does not hold any other resource.
o One technique that can be used requires each
process to request and be allocated
o all its resources before it
begins execution.
o
Another technique is before it can request any
additional resources, it must release all the resources that it is currently
allocated.
Ø These
techniques have two main disadvantages :
§ First,
resource utilization may be low, since many of the resources may be allocated but unused for a long time.
§ We must
request all resources at the beginning for both protocols.
§ starvation
is possible.
Denying No preemption
If
a Process is holding some
resources and requests another resource
that cannot be immediately allocated to it. (that is the process must wait), then all resources currently
being held are preempted. (ALLOW PREEMPTION)
These resources are implicitly released.
The process will be restarted only when
it can regain its old resources.
Denying Circular wait
Ø Impose a
total ordering of all resource types and allow each process to request for resources in an increasing order of enumeration.
o
Let R =
{R1,R2,...Rm} be the set of resource types.
Ø Assign to
each resource type a unique integer number.
Ø If the
set of resource types R includes tapedrives, disk drives and printers.
F(tapedrive)=1,
F(diskdrive)=5,
F(Printer)=12.
Ø Each process can
request resources only
in an increasing
order of
enumeration.
4. Deadlock Avoidance:
ü Deadlock avoidance
request that the OS be given in advance additional
information
concerning which
resources a process will request and useduring
its life time.
With this information it can be decided for each request
whether or not the process should wait.
ü To decide
whether the current request can be satisfied or must be delayed, a system must
consider the resources currently available, the resources currently allocated
to each process and future requests and releases of each process.
Safe State
v A state
is safe if the system can allocate resources to each process in some order and
still avoid a dead lock.
v A
deadlock is an unsafe state.
v Not all
unsafe states are dead locks
v An unsafe
state may lead to a dead lock
Two algorithms are used for deadlock avoidance namely;
1. Resource
Allocation Graph Algorithm - single instance of a resource type.
2. Banker’s
Algorithm – several instances of a resource
type.
Resource allocation graph algorithm
Claim edge - Claim
edge Pi---> Rj indicates that process Pi may request resource Rj at some
time, represented by a dashed directed edge.
·
When process Pi request resource Rj, the claim
edge Pi -> Rj is converted to a request edge.
·
Similarly, when a resource Rj is released by Pi
the assignment edge Rj -> Pi is reconverted to a claim edge Pi -> Rj
Banker's algorithm
Available:
indicates
the number of available resources of each type.
Max:
Max[i, j]=k then process Pi may request
at most k instances of resource type Rj
Allocation : Allocation[i.
j]=k, then process Pi is currently allocated K instances of resource
type Rj
Need : if Need[i, j]=k then process Pi
may need K more instances of resource type Rj Need [i, j]=Max[i,
j]-Allocation[i, j]
Safety algorithm
1 Initialize
work := available and Finish [i]:=false for i=1,2,3 .. n
2 Find an i
such that both
1 Finish[i]=false
b. Needi<= Work
if no
such i exists, goto step 4
3. work
:=work+ allocation i; Finish[i]:=true
goto step 2
4. If
finish[i]=true for all i, then the system is in a safe state
Resource Request Algorithm
Let Requesti be the request from process Pi for resources.
1. If
Requesti<= Needi goto step2, otherwise raise an error condition, since the
process has exceeded its maximum claim.
2. If
Requesti <= Available, goto step3, otherwise Pi must wait, since the
resources are not available.
3. Available
:= Availabe-Requesti;
Allocationi
:= Allocationi + Requesti
Needi :=
Needi - Requesti;
Now apply the safety algorithm to
check whether this new state is safe or not.
If it is
safe then the request from process Pi can be granted.
5. Deadlock Detection
(i) Single instance of each resource type
ResourceAllocation Graph
ii) Several
Instance of a resource type
Available : Number of available resources of each type
Allocation : number of resources of each
type currently allocated toeach process
Request : Current
request of each process
If Request [i,j]=k,
then process Pi is requesting K more instances of resource type Rj.
1.
Initialize work := available
Finish[i]=false,
otherwise finish [i]:=true
2. Find an
index i such that both
a. Finish[i]=false
b. Requesti<=work
if no
such i exists go to step4.
3. Work:=work+allocationi
Finish[i]:=true goto step2
4. If
finish[i]=false
then
process Pi is deadlocked
6. Deadlock Recovery
1.
Process Termination
1. Abort all deadlocked
processes.
2. Abort one
deadlocked process at a time
until the deadlock cycle is eliminated.
After each
process is aborted
, a deadlock
detection algorithm must be
invoked to determine where any process is still dead locked.
2.
Resource Preemption
Preemptive some
resources from process
and give these
resources to other processes until
the deadlock cycle is broken.
i.
Selecting a victim: which
resources and which process are to be preempted.
ii.
Rollback: if we preempt a resource
from a process it cannot continue with its normal execution. It is
missing some needed resource. we must rollback the process to some safe state,
and restart it from that state.
iii.
Starvation : How can
we guarantee that resources will not always be preempted from the same
process.
Related Topics