Chapter: Operating Systems : Process Scheduling and Synchronization
Critical-Section Problem
CRITICAL-SECTION
PROBLEM
ü The
producer-consumer problem described above is a specific example of a more
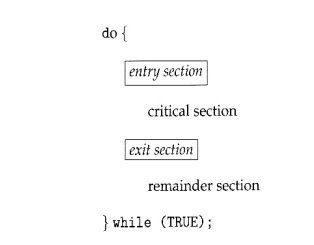
general situation known as the critical section problem. The
general idea is that in a number of cooperating processes, each has a critical
section of code, with the following conditions and terminologies:
o
Only one process in the group can be allowed to
execute in their critical section at any one time. If one process is already
executing their critical section and another process wishes to do so, then the
second process must be made to wait until the first process has completed their
critical section work.
o
The code preceding the critical section, and which
controls access to the critical section, is termed the entry section. It acts
like a carefully controlled locking door.
o
The code following the critical section is termed
the exit section. It generally releases the lock on someone else's door, or at
least lets the world know that they are no longer in their critical section.
p
The rest of the code not included in either the
critical section or the entry or exit sections is termed the remainder section.
ü A
solution to the critical section problem must satisfy the following three
conditions:
1. Mutual
Exclusion - Only one process at a time can be executing in their
critical section.
2. Progress - If no
process is currently executing in their critical section, and one or more
processes want to execute their critical section, then only the processes not
in their remainder sections can participate in the decision, and the decision
cannot be postponed indefinitely. ( i.e. processes cannot be blocked forever
waiting to get into their critical sections. )
3. Bounded
Waiting - There exists a limit as to how many other processes can get
into their critical sections after a process requests entry into their
critical section and before that request is granted. ( I.e. a process
requesting entry into their critical section will get a turn eventually, and
there is a limit as to how many other processes get to go first. )
ü We assume
that all processes proceed at a non-zero speed, but no assumptions can be made
regarding the relative speed of one process versus another.
ü Kernel
processes can also be subject to race conditions, which can be especially
problematic when updating commonly shared kernel data structures such as open
file tables or virtual memory management. Accordingly kernels can take on one
of two forms:
o
Non-preemptive kernels do
not allow processes to be interrupted while in kernel mode. This
eliminates the possibility of kernel-mode race conditions, but requires kernel
mode operations to complete very quickly, and can be problematic for real-time
systems, because timing cannot be guaranteed.
o
Preemptive kernels allow for
real-time operations, but must be carefully written to avoid race
conditions. This can be especially tricky on SMP systems, in which multiple
kernel processes may be running simultaneously on different processors.
Related Topics