Chapter: Operating Systems : Process Scheduling and Synchronization
CPU Scheduling
CPU SCHEDULING
ü
Basic Concepts
Almost
all programs have some alternating cycle of CPU number crunching and waiting
for I/O of some kind. ( Even a simple fetch from memory takes a long time
relative to CPU speeds. )
In a
simple system running a single process, the time spent waiting for I/O is
wasted, and those CPU cycles are lost forever.
A
scheduling system allows one process to use the CPU while another is waiting
for I/O, thereby making full use of otherwise lost CPU cycles.
The
challenge is to make the overall system as "efficient" and
"fair" as possible, subject to varying and often dynamic conditions,
and where "efficient" and "fair" are somewhat subjective
terms, often subject to shifting priority policies.
ü
CPU-I/O Burst Cycle
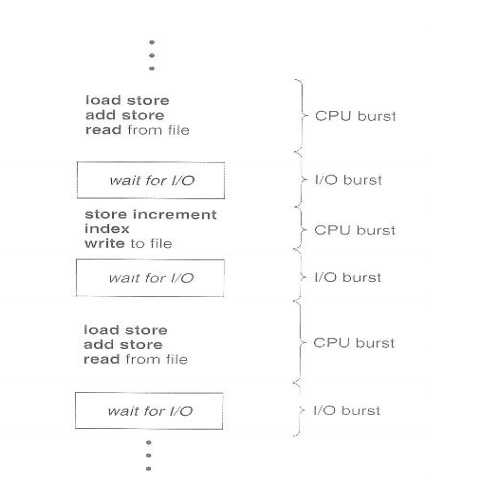
Almost
all processes alternate between two states in a continuing cycle,
as shown in Figure below :
o A CPU burst of performing
calculations, and
o An I/O
burst, waiting for data transfer in or out of the system.
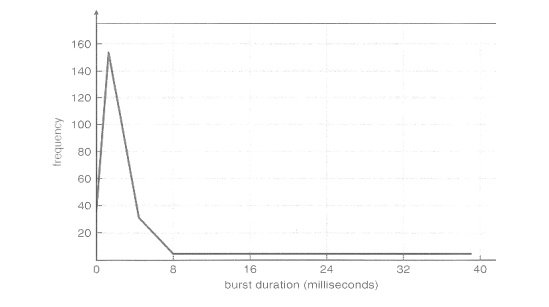
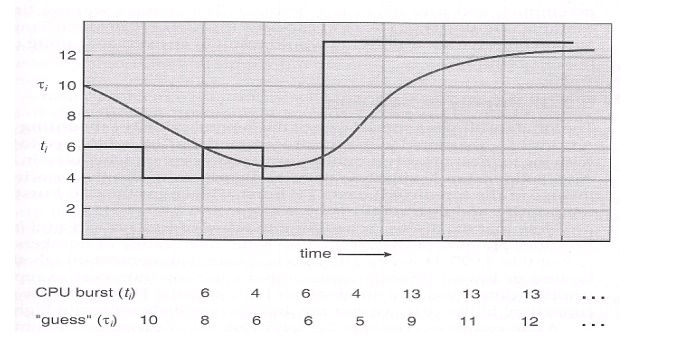
CPU bursts vary from process to process, and from program to
program, but an extensive study shows frequency patterns similar to that shown
in Figure
ü
CPU Scheduler
ü Whenever
the CPU becomes idle, it is the job of the CPU Scheduler ( a.k.a. the
short-term scheduler ) to select another process from the ready queue to run
next.
ü The
storage structure for the ready queue and the algorithm used to select the next
process are not necessarily a FIFO queue. There are several alternatives to
choose from, as well as numerous adjustable parameters for each algorithm.
Preemptive
Scheduling
·
CPU scheduling decisions take place under one of
four conditions:
1. When a
process switches from the running state to the waiting state, such as for an
I/O request or invocation of the wait( ) system call.
2. When a
process switches from the running state to the ready state, for example in
response to an interrupt.
3. When a
process switches from the waiting state to the ready state, say at completion
of I/O or a return from wait( ).
4. When a
process terminates.
·
For conditions 1 and 4 there is no choice - A new
process must be selected.
·
For conditions 2 and 3 there is a choice - To
either continue running the current process, or select a different one.
·
If scheduling takes place only under conditions 1
and 4, the system is said to be non-preemptive, or
cooperative. Under these conditions, once a process starts running
it keeps running, until it either voluntarily blocks or until it finishes.
Otherwise the system is said to be preemptive.
·
Windows used non-preemptive scheduling up to
Windows 3.x, and started using pre-emptive scheduling with Win95. Macs used
non-preemptive prior to OSX, and pre-emptive since then. Note that pre-emptive
scheduling is only possible on hardware that supports a timer interrupt.
·
Note that pre-emptive scheduling can cause
problems when two processes share data, because one process may get interrupted
in the middle of updating shared data structures.
·
Preemption can also be a problem if the kernel is
busy implementing a system call (e.g. updating critical kernel data structures)
when the preemption occurs. Most modern UNIX deal with this problem by making
the process wait until the system call has either completed or blocked before
allowing the preemption Unfortunately this solution is problematic for
real-time systems, as real-time response can no longer be guaranteed.
·
Some critical sections of code protect themselves
from concurrency problems by disabling interrupts before entering the critical
section and re-enabling interrupts on exiting the section. Needless to say,
this should only be done in rare situations, and only on very short pieces of
code that will finish quickly, (usually just a few machine instructions.)
Dispatcher
ü The dispatcher
is the module that gives control of the CPU to the process selected by the
scheduler. This function involves:
o Switching
context.
o Switching
to user mode.
o Jumping
to the proper location in the newly loaded program.
ü The
dispatcher needs to be as fast as possible, as it is run on every context
switch. The time consumed by the dispatcher is known as dispatch latency.
Scheduling
Algorithms
ü The
following subsections will explain several common scheduling strategies,
looking at only a single CPU burst each for a small number of processes.
Obviously real systems have to deal with a lot more simultaneous processes
executing their CPU-I/O burst cycles.
First-Come
First-Serve Scheduling, FCFS
ü
FCFS is very simple - Just a FIFO queue, like
customers waiting in line at the bank or the post office or at a copying
machine.
ü
Unfortunately, however, FCFS can yield some very
long average wait times, particularly if the first process to get there takes a
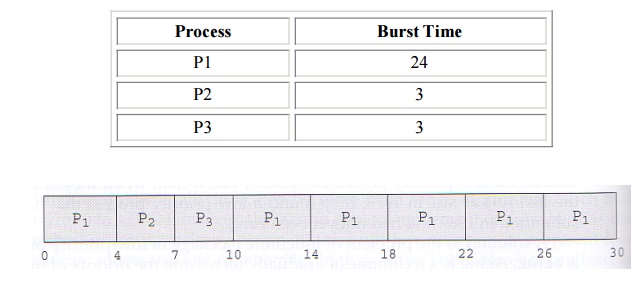
long time. For example, consider the following three processes:
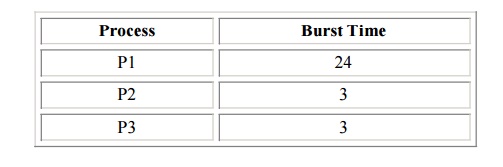
·
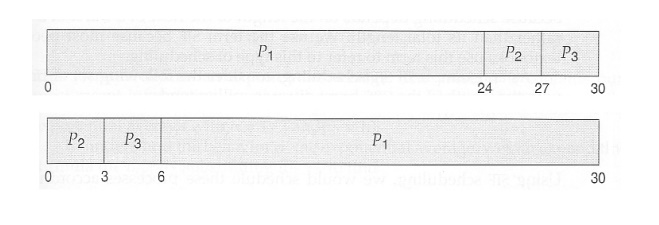
In the first Gantt chart below, process P1 arrives
first. The average waiting time for the three processes is ( 0 + 24 + 27 ) / 3
= 17.0 ms.
·
In the second Gantt chart below, the same three
processes have an average wait time of ( 0 + 3 + 6 ) / 3 = 3.0 ms. The total
run time for the three bursts is the same, but in the second case two of the
three finish much quicker, and the other process is only delayed by a short
amount.
Shortest-Job-First
Scheduling, SJF
The idea behind the SJF algorithm is to pick the quickest
fastest little job that needs to be done, get it out of the way first, and then
pick the next smallest fastest job to do next.
Technically this algorithm picks
a process based on the next shortest CPU burst, not the overall process
time.
For example, the Gantt chart below is based upon the following
CPU burst times, ( and the assumption that all jobs arrive at the same time. )
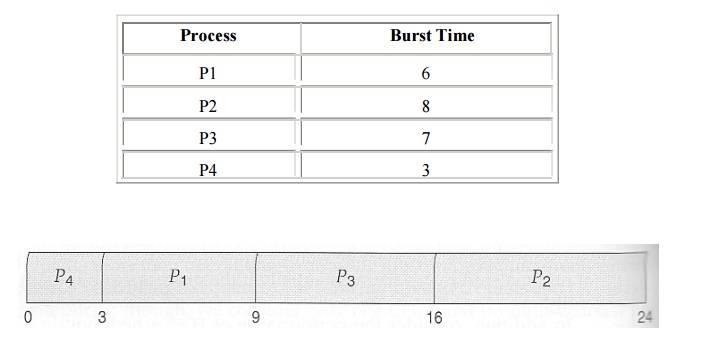
In the case above the average wait time is ( 0 + 3 + 9 + 16 )
/ 4 = 7.0 ms, ( as opposed to 10.25 ms for FCFS for the same processes. )
SJF can be either preemptive or
non-preemptive. Preemption occurs when a new process arrives in the ready queue
that has a predicted burst time shorter than the time remaining in the process
whose burst is currently on the CPU. Preemptive SJF is sometimes referred to as
shortest remaining time first scheduling.
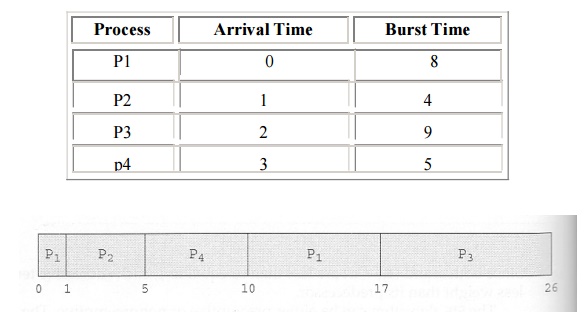
For example, the following Gantt chart is based upon the
following data:
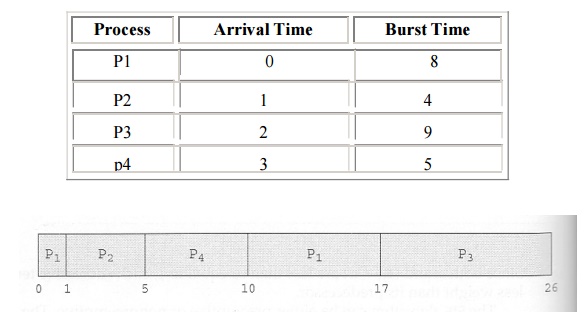
· The average wait time in this case is
((5 - 3 )
+ ( 10 - 1 ) + ( 17 - 2 ) ) / 4 = 26 / 4 = 6.5 ms.
( As
opposed to 7.75 ms for non-preemptive SJF or 8.75 for FCFS. )
Priority
Scheduling
·
Priority scheduling is a more general case of SJF,
in which each job is assigned a priority and the job with the highest priority
gets scheduled first. (SJF uses the inverse of the next expected burst time as
its priority - The smaller the expected burst, the higher the priority. )
·
Note that in practice, priorities are implemented
using integers within a fixed range, but there is no agreed-upon convention as
to whether "high" priorities use large numbers or small numbers.
·
For example, the following Gantt chart is based
upon these process burst times and priorities, and yields an average waiting
time of 8.2 ms:
·
Priorities can be assigned either internally or
externally. Internal priorities are assigned by the OS using criteria such as
average burst time, ratio of CPU to I/O activity, system resource use, and
other factors available to the kernel. External priorities are assigned by
users, based on the importance of the job, fees paid, politics, etc.
Round
Robin Scheduling
·
Round robin scheduling is similar to FCFS
scheduling, except that CPU bursts are assigned with limits called time
quantum.
·
When a process is given the CPU, a timer is set
for whatever value has been set for a time quantum.
o
If the process finishes its burst before the time
quantum timer expires, then it is swapped out of the CPU just like the normal
FCFS algorithm.
If the timer goes off first, then the process is
swapped out of the CPU and moved to the back end of the ready queue.
§ The ready
queue is maintained as a circular queue, so when all processes have had a turn,
then the scheduler gives the first process another turn, and so on.
§ RR
scheduling can give the effect of all processors sharing the CPU equally,
although the average wait time can be longer than with other scheduling
algorithms. In the following example the average wait time is 5.66 ms.
·
The performance of RR is sensitive to the time
quantum selected. If the quantum is large enough, then RR reduces to the FCFS
algorithm; If it is very small, then each process gets 1/nth of the processor
time and share the CPU equally.
·
BUT, a real system invokes overhead
for every context switch, and the smaller the time quantum the more
context switches there are. ( See Figure 5.4 below. ) Most modern systems use
time quantum between 10 and 100 milliseconds, and context switch times on the
order of 10 microseconds, so the overhead is small relative to the time
quantum.
·
In general, turnaround time is minimized if most
processes finish their next cpu burst within one time quantum. For example, with
three processes of 10 ms bursts each, the average turnaround time for 1 ms
quantum is 29, and for 10 ms quantum it reduces to 20.
·
However, if it is made too large, then RR just
degenerates to FCFS. A rule of thumb is that 80% of CPU bursts should be smaller
than the time quantum.
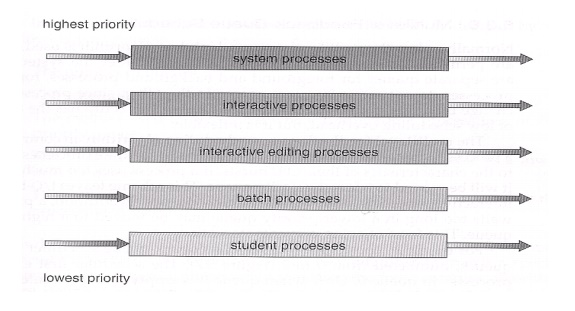
Multilevel Queue Scheduling
ü When
processes can be readily categorized, then multiple separate queues can be
established, each implementing whatever scheduling algorithm is most
appropriate for that type of job, and/or with different parametric adjustments.
ü Scheduling
must also be done between queues, that is scheduling one queue to get time
relative to other queues. Two common options are strict priority ( no job in a
lower priority queue runs until all higher priority queues are empty ) and
round-robin ( each queue gets a time slice in turn, possibly of different
sizes. )
ü Note that
under this algorithm jobs cannot switch from queue to queue - Once they are
assigned a queue, that is their queue until they finish
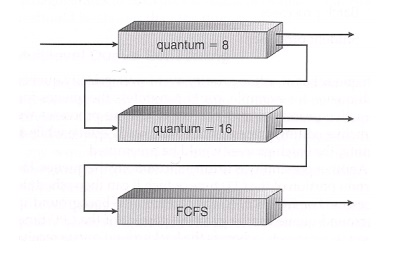
Multilevel Feedback-Queue
Scheduling
1.3 Multilevel
feedback queue scheduling is similar to the ordinary multilevel queue
scheduling described above, except jobs may be moved from one queue to another
for a variety of reasons:
o
If the characteristics of a job change between
CPU-intensive and I/O intensive, then it may be appropriate to switch a job
from one queue to another.
o
Aging can also be incorporated, so that a job that
has waited for a long time can get bumped up into a higher priority queue for a
while.
ü Some of
the parameters which define one of these systems include:
o The number of queues.
o The scheduling algorithm for each queue.
o The
methods used to upgrade or demote processes from one queue to another. ( Which
may be different. )
o The
method used to determine which queue a process enters initially.
Related Topics