Chapter: Automation, Production Systems, and Computer Integrated Manufacturing : Industrial Robotics
Robot Control Systems
ROBOT CONTROL SYSTEMS
The actuations
of the individual joints must be controlled in a coordinated fashion for the
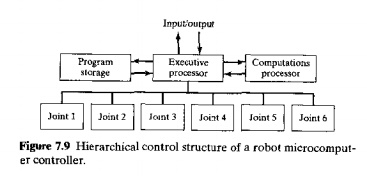
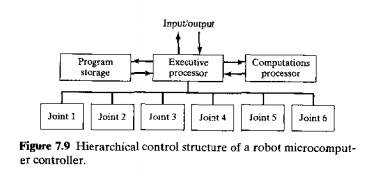
manipulator to perform a desired motion cycle. Microprocessor-based controllers
are commonly used today in robotics as the control system hardware. The
controller is organized in a hierarchical structure as indicated in Figure 7.9
so that each joint has its own feedback control system, and a supervisory
controller coordinates the combined actuations of the joints according to the
sequence of the robot program. Different types of control are required for
different applications. Robot controllers can be classified into four
categories [6]:
(1)
limited sequence control, (2) playback with point-to-point control, (3)
playback with continuous path control, and (4) intelligent control.
Limited
Sequence Control. This is the most elementary control type. It can be utilized
only for simple motion cycles, such as pick-and-place operations [i.e., picking
an object up at one location and placing it at another location). It is usually
implemented by setting limits or mechanical stops for each joint and sequencing
the actuation of the joints to
Playback
with Point to Point Control, Playback robots represent a more-sophisticated
form of control than limited sequence robots. Playback control means that the controller has a memory to record
the sequence of motions in a given work cycle as well as the locations and
other parameters (such as speed) associated with each motion and then to subsequently
play back the work cycle during execution of the program. It is this playback
feature that gives the control type its name. In point-to-point (PTP) control,
individual positions of the robot arm are recorded into memory. These positions
are not limited to mechanical stops for each joint as in limited sequence
robots. Instead. each position in the robot program consists of a set of values
representing locations in the range of each joint of the manipulator. For each
position defined 111 the program, the joints arc thus directed to actuate to
their respective specified locations. Feedback control is used during the
motion cycle to confirm that the individual joints achieve the specified
locations in the program
Playback
with Continuous Path Control. Continuous path robots have the
same
playback
capability as the previous type. The difference between continuous path and
point-to-point is the same in robotics as it is in NC (Section 6.1.3). A
playback robot with continuous path control is capable of one or both of the
following:
1 Cremer storage capacity. The controller
has a far greater storage capacity than its point-to-point counterpart, so that
the number of locations that can be recorded into memory is far greater than
for point=to-point. Thus, the points constituting the motion cycle can be
spaced very closely together to permit the robot to accomplish a smooth
continuous motion. In PTP. only the final location of the individual motion
elements arc controlled. so the path taken by the arm to reach the final
location is not controlled. In a continuous path motion, the movement of the
arm and wrist is controlled during the motion.
Interpolation
calculation. The controller computers the path between the
starting point and the ending point
of each move using interpolation routines similar to those used in NC These
routines generally include linear and circular interpolation (Table 6.1).
The
difference between PIP and continuous path control can be distinguished in the
following mathematical way. Consider a three-axis Cartesian coordinate
manipulator in that the end-of-arm is moved in xyz spare In point-to-point systems,
the .r, y, and z axes are controlled to achieve a
specified point location within the robot's work volume. In continuous path systems. not only are the .r, Land z axes controlled. but the velocities dx/dt. dy/dt.and dzldl are controlled simultaneously to achieve the
specified linear or curvilinear path.
Servo-control is used to continuously regulate the position and speed of the
manipulator. It should be mentioned that a playback robot with continuous path
control has the capacity for PTP control.
Intelligent
Control.
Industrial robots are becoming increasingly intelligent. In this context.
an intelligent robot is one that
exhibits behavior that makes it seem intelligent. Some of the characteristics
that make a robot appear intelligent include the capacity to:
interact with
its environment
make decisions
when things go wrong during
the work cycle
communicate with humans
make computations
during the motion cycle
respond
to advanced sensor inputs such as machine vision
In
addition, robots with intelligent control possess playback capability for both
PTP or continuous path control. These features require (1) a relatively high
level of computer control and (2) an advanced programming language to input the
decision-making logic and other "intelligence" into memory.
Related Topics