Chapter: Automation, Production Systems, and Computer Integrated Manufacturing : Industrial Robotics
Engineering Analysis of Industrial Robots
ENGINEERING ANALYSIS
OF INDUSTRIAL ROBOTS
In this
section. we discuss two problem areas that are central to the operation of an
industrial robot: (1) manipulator kinematics and (2) accuracy and repeatability
with which the robot can position its end effector
Introduction
to Manipulator Kinematics
Manipulator kinematics is
concerned with the position and orientation of the robot's end-of-arm. or the
end effector attached to it as a
function of time but without regard for the effects of force or mass. Of
course, the mass of the manipulator's links and joints, not to mention the mass
of the end effector and load being carried by the
robot, will affect position and orientation as a function of time, but
kinematic analysis neglects this effect. Our treatment of manipulator
kinematics will be limited to the mathematical representation of the position
and orientation of the robot's end-of-arm
Let us
begin by defining terms, The robot manipulator consists of a sequence of joints
and links. Let us name the joints J1,
J2 and so on, starting with the joint closest to the base of the
manipulator. Similarly, the links are identified as L1,L2
and so on, where L1 is the
output link of J1,L2 is the
output link of J2, and so on. Thus, the input link to J2
is L1
and the
input link to J1 is L0. The
final link for a manipulator with n degrees-of-freedom (n joints) is Ln, and its position and orientation determine the
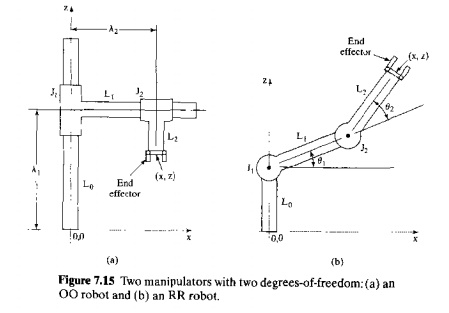
position and orientation of the end effector attached to it. Figure 7.15
illustrates the joint and link identification method for two different
manipulators, each having two joints. In Figure 7.15(a), both joints arc
orthogonal types, so this is an 00 robot
according to our notation scheme of Section 7.1.2. Let us define the values of
the a joints as A1 and A2, where these values represent
the positions
of the
joints relative to their respective input links. Figure 7 .15(b) shows a two
degree-of-freedom robot with configuration RR. Let us define the values of the
two joints as the angles θ1 and θ2, where θ1 is
defined with respect to the horizontal .base. and θ2 is
defined relative to the direction of the input link to Joint le. as illustrated m our diagram
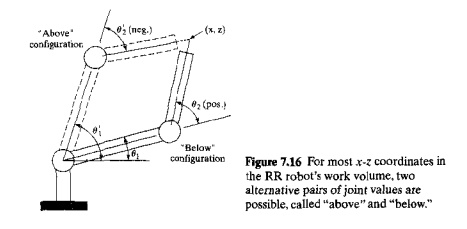
are the values of the joints in the two robots, respectively. We might refer to this method of representation as the joint space method, because it defines position and orientation (symbolized as PI) in term, of the joint values. An alternative way to represent position is by the familiar Cartesian coordinate system, in robotics called the world space method. The origin of thc Cartesian coordinates in world space is usually located in the robot's base. The end-of-arm position Pw is defined in world space as

where x and z are the coordinates of point Pw.
Only two axes are needed for our two-axis robots because the only positions
that can be reached by the robots are in the x-z plane. For a robot with six joints operating in 3D space, the
end-of-arm position and orientation Pu,can be defined as

where x,
v, and z specify the Cartesian coordinates
in world space (position) and a,,B,and X specify
the angles of rotation of the three wrist joints (orientation).
Notice
that orientation cannot be independently established for our two robots in
Figure 7.15. For the 00 manipulator, the end-of-arm orientation is always
vertical; and for the RR manipulator, the orientation is determined by the
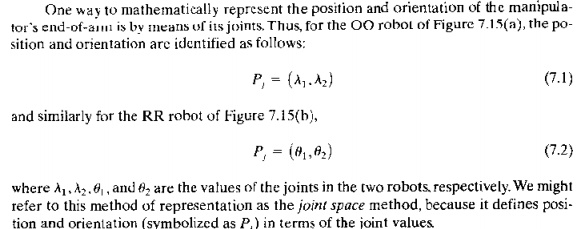
joint angles θ1 and θ,. The reader will observe that the
RR robot has two possible ways of reaching a given set of x and z coordinates, and
so there are two alternative orientations of the endofarm that are possible for
all xz values within the
manipulator's reach except for those coordinate positions making up the outer
circle of the work volume when θ2 is zero.
The two alternative pairs of joint values are illustrated in Figure 7.16.
Forward
and Backward Transformation for a Robot with Two Joints, Both the joint
space and world space methods of defining position in the robot's space are
important. The joint space method is important because the manipulator
positions its end-of-arm by moving its Joints to certain values. The world
space method is important because applications of the robot are defined in
terms of points in space using the Cartesian coordinate system. What is needed
is a means of mapping from one space method to the other.
Mapping
from joint space to world space is called forward
transformation, and converting from world space to joint space is called backward transformation.
The
forward and backward transformations arc readily accomplished for the Cartesian
coordinate robot of Figure 7,15(a), because the x and z coordinates correspond directly with the values of the
joints, For the forward transformation,
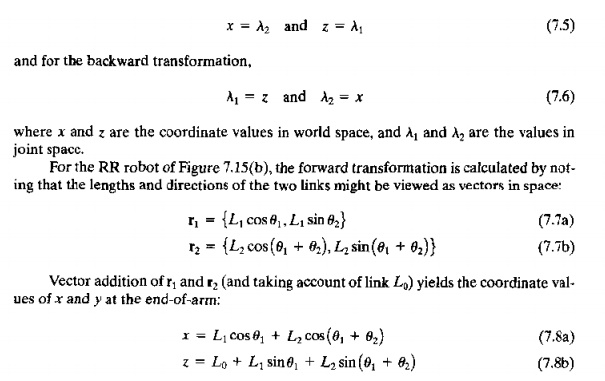
For the
backward transformation, we are given the coordinate positions x and z in world space, and we must calculate the joint values that will
provide those coordinate values. For our RR robot, we must first decide whether the robot will be positioned at the .r, z coordinates using an "above" or "below"
configuration, as defined in Figure 7.16. Let us assume that the application calls for the below configuration, so
that both θ. and θ2 will
take on positive values in our figure. Given the link values L1 and L2• the
following equations can be derived for the two angles θ1 and θ2:
Forward
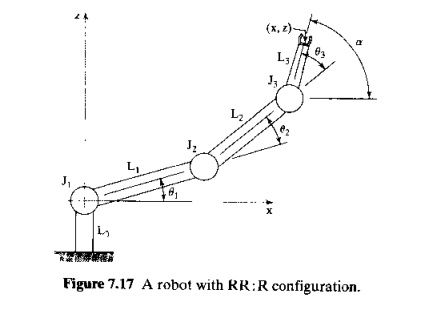
and Backward Transformation for a Robot with Three Joints. Let us consider
a manipulator with three degrees-of-freedom, all rotational, in which the third
joint represents a simple wrist. The robot is a RR: R configuration, shown in
Figure 7.17. We might argue that the arm-and-body (RR:) provides position of
the end-of-arm, and the wrist (: R) provides orientation. The robot is still
limited to the xz plane. Note that we have defined the origin of the axis
system at the center of joint 1 rather than at the base of link 0, as in the
previous RR robot of Figure 7.15(b). This was done to simplify the equations.
For the
forward transformation, we can compute the x
and z coordinates in a way similar to that used for the previous RR robot.

Let us
define a as the orientation angle in
Figure 7.17. It is the angle made by the wrist with the horizontal. It equals
the algebraic sum of the three joint angles:

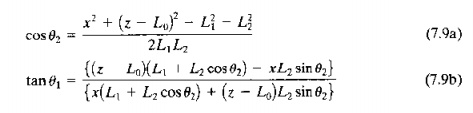
In the
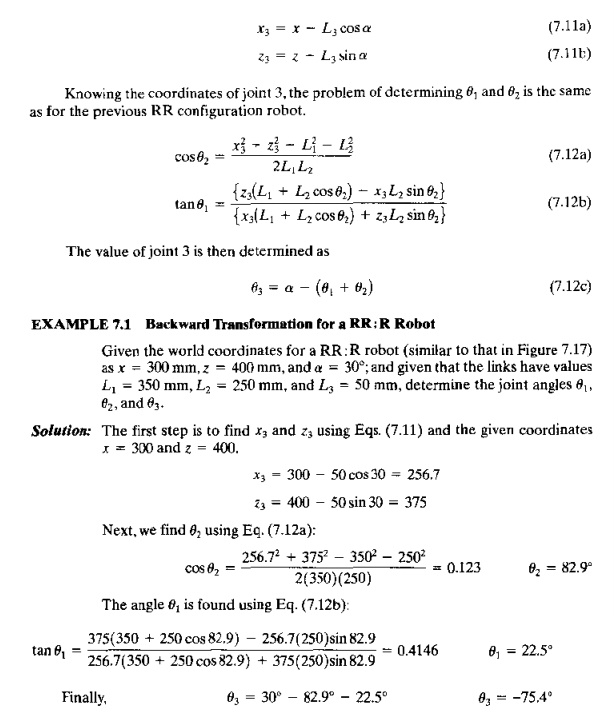
backward transformation. we are given the world coordinates x, z. and a, and we want to calculate the joint values OJ,92, and 9} that
will achieve those coordinates. This is accomplished by first determining the
coordinates of joint 3 (x3 and Z3 as shown in Figure 7.17). The coordinates are
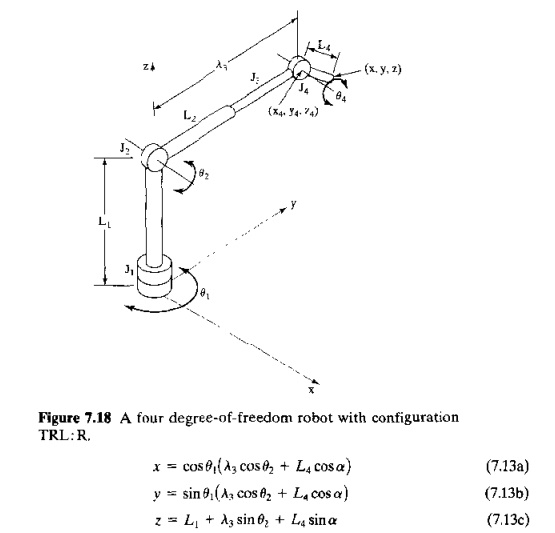
A Four-Jointed
Robot in Three Dimensions. Most robots possess a work volume with three
dimensions. Consider the fourdegreeoffreedom robot in Figure 7.18. Its
configuration is TRL: R. Joint 1 (type T) provides rotation about the z axis, Joint 2 (type R) provides
rotation about a horizontal axis whose direction is determined by joint 1.
Joint 3 (type L) is a piston that allows linear motion in a direction
determined by joints 1 and 2 And joint 4 (type R)
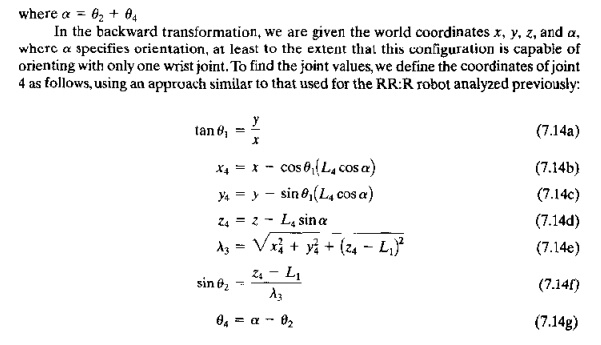
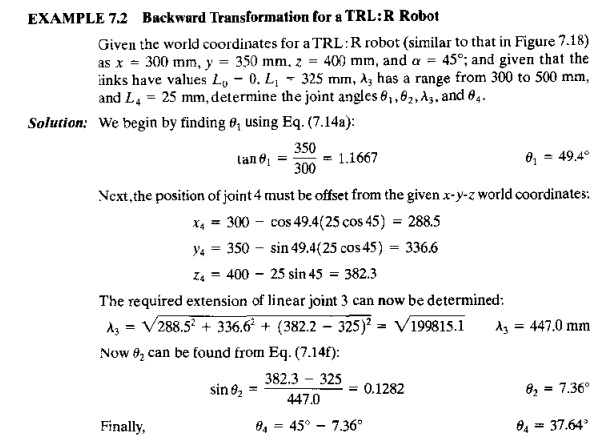
In the
backward transformation, we are given the world coordinates .r, y, e. and a, where a specifies orientation, at least
to the extent that this configuration is capable of orienting with only one
wrist joint. To find the joint values, we define the coordinates of joint 4 as
follows, using an approach similar to that used for the RR:R robot analyzed
previously:
Homogeneous
Transformations for Manipulator Kinematics. Each of
the previous manipulators required its own individual analysis, resulting in
its own set of trigonometric equations, to accomplish the forward and backward
transformations. There is a general approach for solving the manipulator
kinematic equations based on homogeneous transformations. Here we briefly
describe the approach to make the reader aware of its availability. For those
who are interested in homogeneous transformations for robot kinematics, more
complete treatments of the topic are presented in several of our references,
including Craig [3], Groover et al. [6], and Paul [9].
The
homogeneous transformation approach utilizes vector and matrix algebra to
define the joint and link positions and orientations with respect to a fixed
coordinate system (world space). The end-of-arm is defined by the following 4 x
4 matrix:
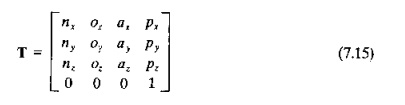
where T
consists of four column vectors representing the position and orientation of
the end-of-arm or end effector of the robot, as illustrated in Figure 7.19, The
vector p defines the position coordinates of the end effector relative to the
world x yz coordinate system The
vectors a, 0, and n define the orientation of the end effector. The a vector,
called the approach vector, points in
the direction of the end effector, The 0 vector, or orientation
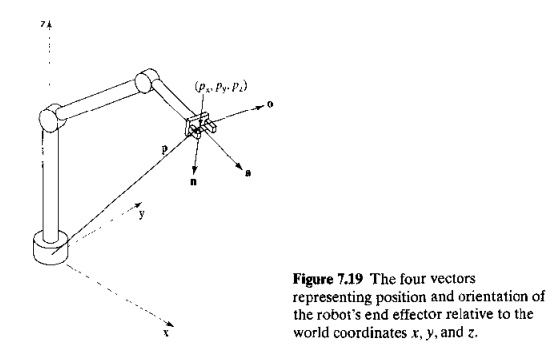
vector, specifies the side-to-side
direction of the end effector. For a gripper, this is in the direction from one
fingertip to the opposite fingertip. The II vector is the normal vector, which is perpendicular to a and o. Together, the
vectors a, 0, and D constitute the coordinate axes of the tool coordinate
system (Section 7.6.1).
A homogeneous transformation is a 4 x 4
matrix used to define the relative translation and rotation between coordinate
systems in three-dimensional space. In manipulator kinematics, calculations
based on homogeneous transformations are used to establish the geometric
relationships among links of the manipulator. For example, let Ai = a 4 x 4 matrix that defines the
position and orientation of link 1 with respect to the world coordinate axis
system. Similarly, A2 = a 4 x 4 matrix that defines the
position and orientation of the link 2 with respect to link 1.Then the position
and orientation of link 2 with respect to the world coordinate system (call it
T2) is given by:
where T2
might represent the position and orientation of the end-of-arm (end of link 2)
of a manipulator with two joints: and Al and A2 define the changes in position
and orientation resulting from the actuations of joints I and 2 on links 1 and
2, respectively.
This
approach can be extended to manipulators with more than two links. In general,
the position and orientation of the end-of-arm or end effector can be
determined as the product of a series uf homogeneous transformations, usually
one transformation for each joint-link combination of the manipulator, These
homogeneous transformations mathematically define the rotations and
translations that are provided by the manipulator's joints and links. For the
four-jointed robot analyzed earlier, the tool coordinate system (position and
orientation of the end effector) might be represented relative to the world
coordinate system as:

where T = the transformation matrix
defining the tool coordinate system, as defined in Eq. (7.15); and A, = transformation matrices (4 x 4)
for each of the four links of the manipulator.
Accuracy
and Repeatability
The
capacity of the robot to position and orient the end of its wrist with accuracy and repeatability is an Important
control attribute in nearly all industrial applications. Some assembly
applications require that objects be located with a precision of 0.05 mm (0.002
in) Other applications, such as spot welding, usually require accuracies of
0.51.0 mm (0.0200.040 in). Let us examine the question of how a robot is able
to move its various joints to achieve accurate and repeatable positioning.
There are several terms that must be defined in the context of this discussion:
(1) control resolution, (2) accuracy, and (3) repeatability.
These
terms have the same basic meanings in robotics that they have in NC. In
robotics. the characteristics are defined at the end of the wrist and in the
absence of any end effector attached at the wrist.
Control resolution refers to
the capability of the robot's controller and positioning system to divide the
range of the joint into closely spaced points that can be identified by the
controller. These are called addressable
points because they represent locations to which the robot can be commanded
to move. Recall from Section 6.6.3 that the capability to divide the range into
addressable points depends on two factors: (1) limitations of the
electromechanical components that make up each joint-link combination and (2)
the controller's bit storage capacity for that joint.
If the
joint-link combination consists of a leadscrew drive mechanism, as in the case
of an NC positioning system, then the methods of Section 6.6.3 can be used to
determine the control resolution. We identified this electromechanical control
resolution as CR10 Unfortunately, from our viewpoint of attempting to analyze
the control resolution of the robot manipulator, there is a much wider variety
of joints used in robotics than in NC machine tools. And it is not possible to
analyze the mechanical details of all of the types here. Let it suffice to
recognize that there is a mechanical limit on the capacity to divide the range
of each joint-link system into addressable points, and that this limit is given
by CR1.
The
second limit on control resolution is the bit storage capacity of the
controller. If B = the
number of bits in the bit storage register devoted to a particular joint, then
the number of addressable points in that joint's range of motion is given by 2B• The
control resolution is therefore defined as the distance between adjacent
addressable points.This can be determined as

where CR2
= control resolution determined by
the robot controller; and R = range of
the joint-link combination, expressed in linear or angular units, depending on
whether the joint provides a linear motion (joint types L or 0) or a rotary motion (joint types
R, T, or V). The control resolution of each joint-link mechanism will be the
maximum of CRj and CR2;
that is,

In our
discussion of control resolution for NC (Section 6.6.3), we indicated that it
is desirable for CR2<=CRj, which means that the limiting factor in determining control resolution
is the mechanical system, not the computer control system. Because the
mechanical structure of a robot manipulator is much less rigid than that of a
machine tool, the control resolution for each joint of a robot will almost
certainly be determined by mechanical factors (CR,).
Similar
to the case of an NC positioning system, the ability of a robot manipulator to
position any given joint-link mechanism at the exact location defined by an
addressable point is limited by mechanical errors in the joint and associated
links. The mechanical errors arise from such factors as gear backlash, link
deflection, hydraulic fluid leaks, and various other sources that depend on the
mechanical construction of the given joint-link combination. If we characterize
the mechanical errors by a normal distribution, as we did in Section 6,6.3,
with mean /L at the addressable point and standard deviation 0"
characterizing the magnitude of the error dispersion. then accuracy and
repeatability for the axis can he defined.
Repeatability
is the easier term to define. Repeatability
is a measure of the robot's ability to position its end-of wrist at a
previously taught point in the work volume. Each time the robot attempts to
return to the programmed point it will return to a slightly different position.
Repeatability errors have as their principal source the mechanical errors
previously mentioned. Therefore, as in NC, for a single joint-link mechanism,

where σ = standard deviation of the error distribution,
Accuracy is a measure of the robot's
ability to position the end of its wrist at a desired location in the work volume. For a single axis, using the same
reasoning used to define ac. curacy in our discussion of NC, we have

where CR=control resolution from Eq. (7.18).
The terms
control resolution, accuracy, and repeatability are illustrated in Figure 6.29
of the previous chapter fur one axis that is linear. For a rotary joint, these
parameters can be conceptualized as either an angular value of the joint itself
or an arc length at the end of the joint's output link.
EXAMPLE 7.3 Control Resolution, Accuracy, and Repeatability in Robotic
Arm Joint
One of
the joints of a certain industrial robot has a type L joint with a range of 0.5
rn. The bit storage capacity of the robot controller is 10 bits for this joint.
The mechanical errors form a normally distributed random variable about a given
taught point. The mean of the distribution is zero and the standard deviation
is 0,06 mm in the direction of the output link of the joint. Determine the
control resolution (CR1), accuracy, and repeatability for
this robot joint.
Solution: The number of addressable points
in the joint range is 210 = 1024.
The control resolution is therefore
Our definitions
of control resolution, accuracy, and repeatability have been depicted using a
single joint or axis. To be of practical value, the accuracy and repeatability
of a robot manipulator should include the effect of all of the joints, combined
with the effect of their mechanical errors. For a multiple degree of freedom
robot, accuracy and repeatability will vary depending on where in the work
volume the end-of-wrist is positioned. The reason for this is that certain
joint combinations will tend to magnify the effect of the control resolution
and mechanical errors. For example. for a polar configuration robot (TRL) with
its linear joint fully extended, any errors in the R or T joints will be larger
than when the linear joint is fully retracted.
Robots
move in three-dimensional space, and the distribution of repeatability errors
is therefore three-dimensional. In 3D, we can conceptualize the normal
distribution as a sphere whose center (mean) is at the programmed point and
whose radius is equal to three standard deviations of the repeatability error
distribution. For conciseness, repeatability is usually expressed in terms of
the radius of the sphere; for example. ±1.0 mm (±O.040 in). Some of today's
small assembly robots have repeatability values as low as ±0.05 mm (±O.OO2 in).
In
reality, the shape of the error distribution will not be a perfect sphere in
three dimensions. In other words, the errors will not be isotropic. Instead,
the radius will vary because the associated mechanical errors will be different
in certain directions than in others, The mechanical arm of a robot is more
rigid in certain directions, and this rigidity influences the errors. Also, the
so called sphere will not remain constant in size throughout the robot's work
volume, As with spatial resolution, it will be affected by the particular
combination of joint positions of the manipulator. In some regions of the work
volume, the repeatability errors win be larger than in other regions.
Accuracy
and repeatability have been defined above as static parameters of the
manipulator. However, these precision parameters are affected by the dynamic
operation of the robot. Such characteristics as speed, payload, and direction
of approach will affect the robot's accuracy and repeatability.
Related Topics