Chapter: Automation, Production Systems, and Computer Integrated Manufacturing : Industrial Robotics
End Effectors: Grippers and Tools
END
EFFECTORS
In our
discussion of robot configurations , we mentioned that an end effector
is usually attached to the robot's wrist. The end effector enables the robot to
accomplish a specific task. Because of the wide variety of tasks performed by
industrial robots, the end effector must usually be custom-engineered and
fabricated for each different application. The two categories of end effectors
are grippers and tools.
Grippers
Grippers are end
effectors used to grasp and manipulate objects during the work cycle. The objects are usually workparts that
are moved from one location to another in the cell. Machine loading and
unloading applications fall into this category (Section 7.5.1). Owing to the
variety of part shapes, sizes, and weights, grippers must usually be custom
designed. Types of grippers used in industrial robot applications include the
following:
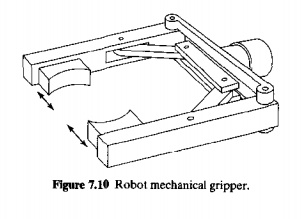
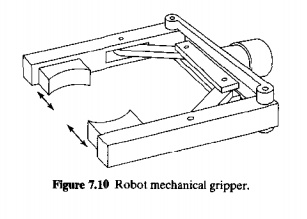
mechanical
grippers, consisting of two or more fingers that can be actuated by the robot controller to open and dose to grasp the workpart; Figure
7.10 shows a two-finger gripper
vacuum grippers,
in which suction cups are used to hold flat objects
magnetized devices,
for holding ferrous parts
Mechanical
grippers are the most common gripper type. Some of the innovations und advances
in mechanical gripper technology include:
Dual
grippers, consisting of two gripper devices in one end effector, which are useful for machine loading and unloading. With
a single gripper, the robot must reach into the production machine twice. once
to unload the finished part from the machine, and the second time to load the
next part into the machine. With a dual gripper, the robot picks up the next
workpart while the machine is still processing the preceding part: when the
machine finishes, the robot reaches into the machine once to remove the
finished part and load the next part. This reduces the cycle time per part.
interchangeable
fingers that can be used on one gripper mechanism. To accommodate different
parts, different fingers are attached to the gripper.
Sensory feedback
in the fingers that provide
the gripper with
capabilities such as:
sensing the presence of the workpart or (2)
applying a specified limited force to the workpart during gripping (for fragile
workparts).
Multiple
fingered grippers that possess
the general anatomy of a human
hand.
Standard
gripper products that are commercially available, thus reducing the
need to custom-design a gripper for
each separate robot application.
Tools
Tools are
used in applications where the robot must perform some processing operation on
the workpart. The robot therefore manipulates the tool relative to a stationary
or slowly moving object (e.g., work part or subassembly). Examples of the tools
used as end effectors by robots to perform processing applications include:
spot
welding gun
arc
welding tool
spray
painting gun
rotating spindle
for drilling, routing. grinding,
and so forth
assembly tool (e.g., automatic screwdriver)
heating torch
water jet
cutting tool.
In each
case, the robot must not only control the relative position of the tool with
respect to the work as a function of time, it must also control the operation
of the tool. For this purpose. the robot must be able to transmit control
signals to the tool for starting, stopping, and otherwise regulating its
actions.
In some applications, multiple tools must be used by the robot during the work cycle, For example. several sizes of routing or drilling bits must be applied to the workpart. Thus, a means of rapidly changing the tools must be provided. The end effector in this case takes the form of a fast-change tool holder for quickly fastening and unfastening the various tools used during the work cycle.
Related Topics