Chapter: Automation, Production Systems, and Computer Integrated Manufacturing : Industrial Robotics
Robot Anatomy and Related Attributes
ROBOT ANATOMY AND RELATED ATTRIBUTES
The
manipulator of an industrial robot is constructed of a series of joints and
links. Robot anatomy is concerned with the types and sizes of these joints and
links and other aspects of the manipulator's physical construction.
1 Joints
and Links
A
joint of an industrial robot is similar to a joint in the human body: It provides
relative motion between two parts of the body. Each joint, or axis as it is sometimes called, provides
the robot with a so called degree-of-freedom
(d.o.f.) of motion. In nearly all cases, only one degree of freedom is
associated with a joint. Robots are often classified according to the total
number of degrees-of-freedom they possess. Connected to each joint are two
links, an input link and an output link. Links
are the rigid components of the robot manipulator. The purpose of the joint is
to provide controlled relative movement between the input link and the output
link.
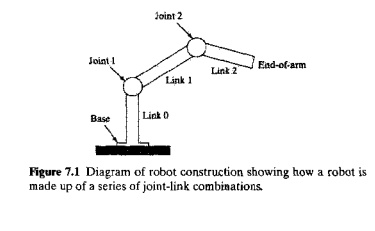
Most
robots are mounted on a stationary base on the floor. Let us refer to that base
and its connection to the first joint as link 0.1t is the input link to joint
1, the first in the series of joints used in the construction of the robot. The
output link of joint 1 is link 1. Link 1 is the input link to joint 2, whose
output link is link 2, and so forth. This joint-link numbering scheme is
illustrated in Figure 7.1.
Nearly
all industrial robots have mechanical joints that can be classified into one of
five types: two types that provide translational motion and three types that
provide rotary motion. These joint types are illustrated in Figure 7.2 and are
based on a scheme described in [6]. The five joint types are:
Linear joint
(type L-joint).The relative movement between the input link and the output
link is a translational sliding motion, with the axes of the two links being
parallel.
Orthogonal
Joint (type U joint). This is also a
translational sliding motion, but the input
and output links are perpendicular to each other during the move.

Rotational Join (type R joint). This type
provides rotational relative motion, with
the axis of rotation perpendicular to the axes of the input and output
links.
Twisting joint
(type T
joint) This joint also involves rotary motion, but the axis or rotation is
parallel to the axes of the two links.
Revolving joint (type V joint, V from the "v' in revolving).
In this joint type, the axis 0' the input link is parallel to the
axis of rotation of the joint. and the axis of the output link is perpendicular
to the axis of rotation.
Each of
these joint types has a range over which it can be moved. The range for a
translational joint is usually less than a meter. The three types of rotary
joints may have a range as small as a few degrees or as large as several
complete turns
2 Common Robot Configurations
A robot
manipulator can he divided into two sections: a body-and-arm assembly and a wrist assembly. There are usually three
degrees-of-freedom associated with the body-and-arm, and either two or three
degrees-of-freedom associated with the wrist. At the end of the manipulator's
wrist is a device related to the task that must be accomplished by the robot.
The device, called an end effector
(Section 7.3), is usually either (1) a gripper for holding a work-part or (2) a
tool for performing some process. The body-and-arm of the rotor is used to
position the end effector. and the robot's wrist is used to orient the end
effector.
Body-and-Arm
Configurations. Given the five types of joints defined above, there are 5 x 5
x 5 = 125 different combinations of joints that can be used to design the body-and-arm assembly for a three-degree-of-freedom
robot manipulator. In addition, there are design variations within the
individual joint types [e.g.. physical size of the joint and range of motion).
It is somewhat remarkable, therefore, that there are only five basic
configurations commonly available in commercial industrial robots. These five
configurations are:
Polar configuration. This
configuration (Figure 7.3) consists of a sliding arm (L joint) actuated relative to the body, that can
rotate about both a vertical axis (1' joint) and a horizontal axis (R joint).
Cylindrical configuration. This
robot configuration (Figure 7.4) consists of a vertical column, relative to which an arm assembly is moved up or down. The
arm can be moved in and out relative to the axis of the column. Our figure
shows one possible way in which this configuration can be constructed, using a
T joint to rotate the column about its axis An 1. joint is used to move the arm
assembly vertically along the column, while an 0 joint is used to achieve
radial movement of the ann,
Cartesian
coordinate robot. Other names for this configuration include
rectilinear robot and iyz robot. As shown in Figure 7 5,it is
composed of three sliding joints, two of which are orthogonal.
4, Jointed-arm-robot. This
robot manipulator (Figure 7.6) has the general configuration of a human arm. The jointed arm
consists of a vertical column that swivels about the
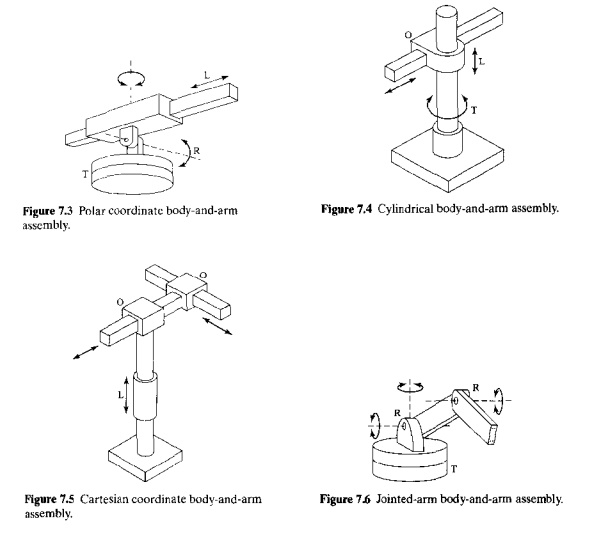
base
using a T joint. At the top of the column is a shoulder joint (shown as an R joint
in our figure), whose output link connects to an elbow joint (another R joint)
5. SCARA. SCARA is
an acronym for Selective Compliance Assembly Robot Arm. This configuration (Figure 7.7)
is similar to the jointed arm robot except that the shoulder and elbow
rotational axes are vertical, which means that the arm is very rigid in the
vertical direction. but compliant in the horizontal direction. This permits The
robot to perform insertion tasks (for assembly) in a vertical direction, where
some side-to-side alignment may be needed to mate the two parts properly.
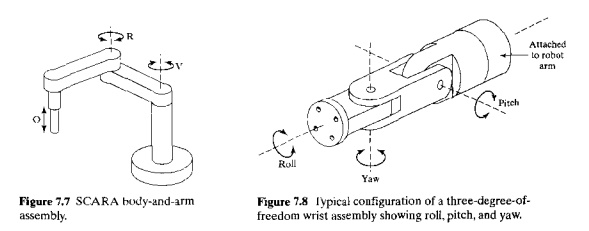
Wrist
Configurations. The robot's wrist is used to establish the
orientation of the end effector. Robot wrists
usually consist of two or three degrees-of-freedom. Figure 7.8 illustrates one
possible configuration for a three-degree-of-freedom wrist assembly. The three
joints are defined as: (1) roll, using a T joint to accomplish
rotation about the robot's arm axis: (2) pitch,
which involves up-and-down rotation, typically using a R joint; and (3) yaw, which involves right-and-left
rotation, also accomplished by means of an R-joint, A two-d.o.f wrist typically
includes only roll and pitch joints (T and R joints).
To avoid
confusion in the pitch and yaw definitions, the wrist roll should be assumed in
its center position, as shown in our figure. To demonstrate the possible
confusion, consider a two-jointed wrist assembly. With the roll joint in its
center position, the second joint (R joint) provides up-and-down rotation
(pitch). However, if the roll position were 90 degrees from center (either
clockwise or counterclockwise), the second joint would provide a right-left
rotation (yaw).
The SCARA
robot configuration (Figure 7.7) is unique in that it typically does not have a
separate wrist assembly. As indicated in our description, it is used for
insertion type assembly operations in that the insertion is made from above.
Accordingly. the orientation requirements are minimal, and the wrist is
therefore not needed. Orientation of the object to be inserted is sometimes
required, and an additional rotary joint can be provided for this purpose. The
other four body-and-arm configurations possess wrist assemblies that almost
always consist of combinations of rotary joints of types Rand T.
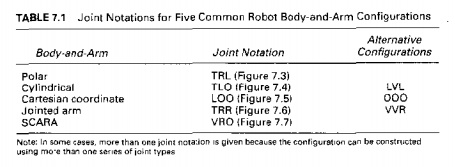
Joint Notation System. The
letter symbols for the five joint types (L, 0, R, T, and V) can be used to define a joint notation system for the robot
manipulator. In this notation system, the manipulator is described by the joint
types that make up the body-and-arm assembly. followed by the joint symbols
that make lip the wrist. For example, the notation TLR: TR represents a five
degree-of-freedom manipulator whose body-and-arm is made up of a twisting joint
(joint 1 = T),a
linear joint (joint 2 = L), and
a rotational joint (joint 3 = R). The
wrist consists of two joints, a twisting joint (joint 4 = T) and a rotational joint (joint
5 '" R). A colon separates the body-and-arm notation from the wrist
notation. Typical joint notations for the five common body-and-arm
configurations are presented in Table 7.1 . Common wrist joint notations are
TRR and TR.
Work Volume. The work volume (the term work envelope is also used) of the
manipulator is defined as the envelope or space within which the robot can
manipulate the end of its wrist. Work volume is determined by the number and
types of joints in the manipulator (body-and-arm and wrist), the ranges of the
various joints, and the physical sizes of the links. The shape of the work
volume depends largely on the robot's configuration. A polar configuration
robot tends to have a partial sphere as its work volume, a cylindrical robot
has a cylindrical work envelope. and a Cartesian coordinate robot has a rectangular
work volume.
3 Joint Drive Systems
Robot joints
are actuated using any of
three possible types of drive
systems: (1) electric, (2)
hydraulic, or (3) pneumatic. Electric drive systems use electric motors as
joint actuators (e.g., servomotors or stepping motors, the same types of motors
used in NC positioning systems, Chapter 6), Hydraulic and pneumatic drive
systems use devices such as linear pistons and rotary vane actuators to
accomplish the motion of the joint.
Pneumatic
drive is typically limited to smaller robots used in simple material transfer
applications. Electric drive and hydraulic drive are used on more-sophisticated
industrial robots. Electric drive has become the preferred drive system in
commercially available robots, as electric motor technology has advanced in
recent years. It is more readily adaptable to computer control, which is the
dominant technology used today for robot controllers. Electric drive robots are
relatively accurate compared with hydraulically powered robots. By contrast, the advantages of
hydraulic drive include greater speed and strength.
The drive
system, position sensors (and speed sensors if used), and feedback control
systems for the joints determine the dynamic response characteristics of the
manipulator. The speed with which the robot can achieve a programmed position
and the stability of its motion are important characteristics of dynamic
response in robotics. Speed refers to
the absolute velocity of the manipulator at its end-of-arm. The maximum speed
of a large robot is around 2 rn/sec (6 ft/sec). Speed call be programmed into
the work cycle so that different portions of the cycle are carried out at
different velocities. What is sometimes more important than speed is the
robot's capability to accelerate and decelerate in a controlled manner. In many
work cycles. much of the robot's movement is performed in a confined region of
the work volume; hence, the robot never achieves its top-rated velocity. In
these cases, nearly all of the motion cycle is engaged in acceleration and
deceleration rather than in constant speed. Other factors that influence speed
of motion are the weight (mass) of the object that is being manipulated and the
precision with which the object must be located at the end of a given move. A
term that takes au of these factors into consideration is speed of response, that
refers to the time required for the
manipulator to move from one point in
space to the next. Speed of response is important because it influences the
robot's cycle time, that in turn affects the production rate in the
application. Stability refers to the
amount of overshoot and oscillation that occurs in the robot motion at the end-of-arm
as it attempts to move to the next programmed location. More oscillation in the
motion is an indication of less stability. The problem is that robots with
greater stability are inherently slower in their response, whereas faster
robots are generally less stable.
Load
carrying capacity depends on the robot's physical size and construction as well
as the force and power that can be transmitted to the end of the wrist. The
weight carrying capacity of commercial robots ranges from less than 1 kg up to
approximately 900 kg (2000 lb). Medium sized robots designed for typical
industrial applications have capacities in the range 10 to 45 kg (25 to 100
Ib). One factor that should be kept in mind when considering load carrying
capacity is that a robot usually works with a tool or gripper attached to its
wrist Grippers are designed to grasp and move objects about the work cell. The
net load carrying capacity of the robot is obviously reduced by the weight of the gripper. If
the robot is rated at a 10 kg (22 lb} capacity and the weight of the gripper is
4 kg (9 lbs}, then the net weight carrying capacity is reduced to 6 kg (13Ib)
Related Topics