Chapter: Digital Signal Processing : FIR Filter Design
Overflow Oscillations
Overflow Oscillations:
With
fixed-point arithmetic it is possible for filter calculations to overflow. This
happens when two numbers of the same sign add to give a value having magnitude
greater than one. Since numbers with magnitude greater than one are not
representable, the result overflows. For example, the two’s complement numbers
0.101 (5/8) and 0.100 (4/8) add to give 1.001 which is the two’s complement
representation of -7/8.
The
overflow characteristic of two’s complement arithmetic can be represented as R{} where

An
overflow oscillation, sometimesX+2
also Xreferred<-1 to as an adder overflow limit cycle, is a high- level oscillation that can
exist in an otherwise stable fixed-point
filter due to the gross nonlinearity associated with the overflow of internal
filter calculations [17]. Like limit cycles, overflow oscillations require
recursion to exist and do not occur in nonrecursive FIR filters. Overflow
oscillations also do not occur with floating-point arithmetic due to the
virtual impossibility of overflow.
As an
example of an overflow oscillation, once again consider the filter of (3.69)
with 4-b fixed-point two’s complement arithmetic and with the two’s complement
overflow characteristic of (3.71):
s to
scale the filter calculations so as to render overflow impossible. However,
this may unacceptably restrict the filter dynamic range. Another method is to
force completed sums- of- products to saturate at ±1, rather than overflowing.
It is important to saturate only the completed sum, since intermediate
overflows in two’s complement arithmetic do not affect the accuracy of the
final result. Most fixed-point digital signal processors provide for automatic
saturation of completed sums if their saturation
arithmetic feature is enabled. Yet another way to avoid overflow
oscillations is to use a filter structure for which any internal filter
transient is guaranteed to decay to zero [20]. Such structures are desirable
anyway, since they tend to have low roundoff noise and be insensitive to
coefficient quantization.
Coefficient Quantization Error:
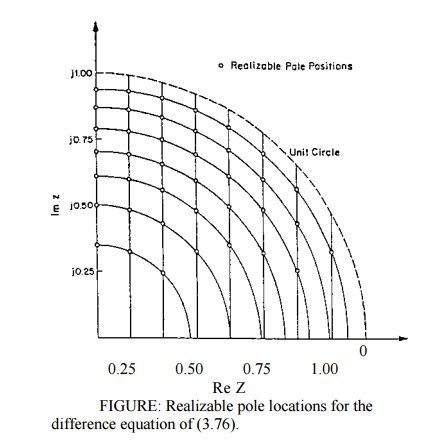
The
sparseness of realizable pole locations near z = ± 1 will result in a large coefficient quantization error for
poles in this region.
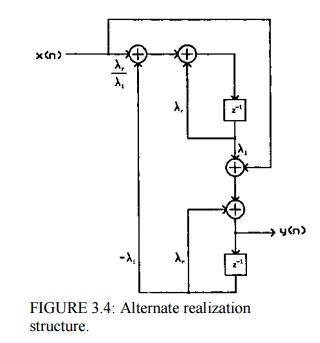
Figure3.4
gives an alternative structure to (3.77) for realizing the transfer function of
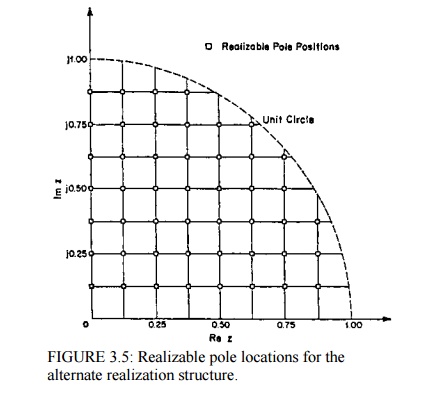
(3.76). Notice that quantizing the coefficients of this structure corresponds
to quantizing Xr and Xi. As shown in Fig.3.5 from, this
results in a uniform grid of realizable pole locations. Therefore, large
coefficient quantization errors are avoided for all pole locations.
It is
well established that filter structures with low roundoff noise tend to be
robust to coefficient quantization, and visa versa. For this reason, the
uniform grid structure of Fig.3.4 is also popular because of its low roundoff
noise. Likewise, the low-noise realizations can be expected to be relatively
insensitive to coefficient quantization, and digital wave filters and lattice
filters that are derived from low-sensitivity analog structures tend to have
not only low coefficient sensitivity, but also low roundoff noise.
It is
well known that in a high-order polynomial with clustered roots, the root
location is a very sensitive function of the polynomial coefficients. Therefore,
filter poles and zeros can be much more accurately controlled if higher order
filters are realized by breaking them up into the parallel or cascade
connection of first- and second-order subfilters. One exception to this rule is
the case of linear- phase FIR filters in which the symmetry of the polynomial
coefficients and the spacing of the filter zeros around the unit circle usually
permits an acceptable direct realization using the convolution summation.
Given a
filter structure it is necessary to assign the ideal pole and zero locations to
the realizable locations. This is generally done by simplyrounding or
truncatingthe filter coefficients to the available number of bits, or by
assigning the ideal pole and zero locations to the nearest realizable locations.
A more complicated alternative is to consider the original filter design
problem as a problem in discrete
optimization,
and choose the realizable pole and zero locations that give the best
approximation to the desired filter response.
Related Topics