Chapter: Mechanical : Robotics : Robot Kinematics And Robot Programming
Motion Commands and the Control of Effectors of Robot
Motion
Commands and the Control of Effectors
Real-time systems are slaves to the clock. They
achieve the illusion of smooth behavior by rapidly updating a set of control
signals many times per second. For example, to smoothly turn a robot's head to
the right, the head must accelerate, travel at constant velocity for a while,
and then decelerate. This is accomplished by making many small adjustments to
the motor torques. Another example: to get the robot's LEDs to blink
repeatedly, they must be turned on for a certain period of time, then turned
off for another length of time, and so forth. To get them to glow steadily at
medium intensity, they must be turned on and off very rapidly.
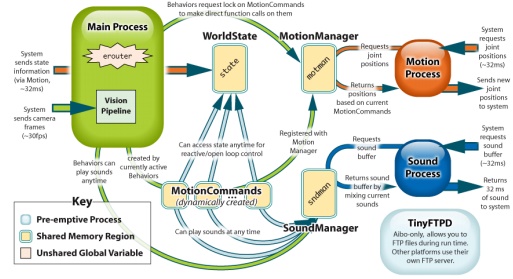
The robot's operating system updates the states of
all the effectors (servos, motors, LEDs, etc.) every few milliseconds. Each
update is called a "frame", and can accommodate simultaneous changes
to any number of effectors. On the AIBO, updates occur every 8 milliseconds and
frames are buffered four at a time, so the application must have a new buffer
available every 32 milliseconds; other robots may use different update
intervals. In Tekkotsu these buffers of frames are produced by the
MotionManager, whose job is to execute a collection of simultaneously active
MotionCommands (MCs) of various types every few milliseconds. The results of
these MotionCommands are assembled into a buffer that is passed to the
operating system (Aperios for the AIBO, or Linux for other robots).
Suppose we want the robot to blink its LEDs on and
off at a rate of once per second. What we need is a MotionCommand that will
calculate new states for the LEDs each time the MotionManager asks for an
update. LedMC, a subclass of both MotionCommand and LedEngine, performs this
service. If we create an instance of LedMC, tell it the frequency at which to
blink the LEDs, and add it to the MotionManager's list of active MCs, then it
will do all the work for us. There's just one catch: our application is running
in the Main process, while the MotionManager runs in a separate Motion process.
This is necessary to assure that potentially lengthy computations taking place
in Main don't prevent Motion from running every few milliseconds. So how can we
communicate with our MotionCommand while at the same time making it available
to the MotionManager?
The solution is to construct MotionCommands in a
memory region that is shared by both processes. Because we have continuous
access to the MotionCommand, we can change its parameters even while it's
active, to tell it to do different things. But it's dangerous to modify a
MotionCommand while the MotionManager is in the midst of invoking it.
Therefore, Tekkotsu provides a mutual exclusion mechanism called an MMAccessor
that temporarily locks out the MotionManager when we need to invoke a
MotionCommand's member functions from within Main. Whenever we want to call
such functions, we must lock down the MotionCommand by creating an MMAccessor
first. Destroying the MMAccessor unlocks the MotionCommand.
There is one remaining wrinkle to the story. When a
MotionCommand is passed to the MotionManager, it is assigned a unique ID called
an MC_ID that identifies it within the MotionManager's active list. To lock the
MotionCommand, we must pass this MC_ID value to the MMAccessor constructor. The
MC_ID is also used when we tell the MotionManager to remove this MotionCommand
from its active list. So the MC_ID must be saved somewhere. Normally it is kept
in a protected data member within the Behavior instance so it can be shared by
the doStart, doStop, and doEvent methods.
To summarize: MotionCommands must be instantiated in
shared memory. An MC_ID, which is typically stored locally in the Behavior (not
in shared memory), uniquely identifies the MotionCommand within the
MotionManager's active list. Certain member functions of the MotionCommand will
be called repeatedly from within the Motion process, by the MotionManager, to
compute updated effector states. An MMAccessor, created in Main using the
MC_ID, must be used to lock down an active MotionCommand so we can safely call its
member functions from within the Main process.
Related Topics