Chapter: Mechanical : Robotics : Robot Kinematics And Robot Programming
Differentiate forward and inverse kinematics
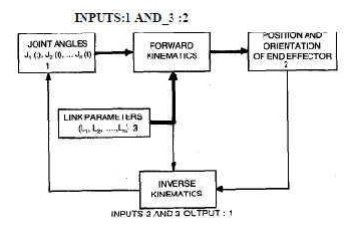
Differentiate forward and inverse
kinematics
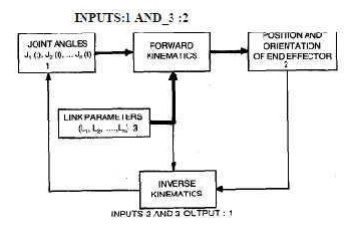
Forward kinematics:
The transformation of coordinates of the
end-effector point from the joint space to the world space is known as forward
kinematic transformation.
Reverse kinematics:
The transformation of coordinates
from world space to joint space is known as backward or reverse kinematic
transformation.
Robot Kinematics:
Robot arm kinematics deals with the analytic study
of the motion of a robot arm with respect to a fixed reference coordinate
system as a function of time.
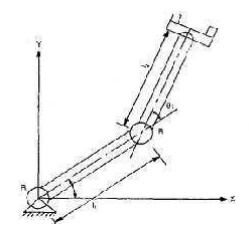
The mechanical manipulator can be modelled as an
open loop articulated chain with several rigid links connected in
seriesatic‘ by join eithers driven revolute‘ by
Representing
the Position Considering the revolute type of joint only, the position of the
end-effector can be represented by the joint angles, 0 02,...,. 0,, as,
Ppppppppppp
The
position of the end-effector can also be defined in world space as,
Ppppppppppp
Related Topics