Chapter: Mechanical : Robotics : Robot Kinematics And Robot Programming
Direct and inverse kinematics of 4 degrees of freedom
Direct
and inverse kinematics of 4 degrees of freedom
Expression for direct and inverse
kinematics of 4 degrees of freedom robot
A
4-Degree of Freedom Manipulator in (3D) Three Dimensions:
The
configuration of a manipulator in three dimensions. The manipulator has 4
degrees - of freedom: joint I (type T joint) allows rotation about the z axis;
joint 2 (type R) allows rotation about an axis that is perpendicular to the z
axis; joint 3 is a linear joint which is capable of sliding over a certain
range; and joint 4 is a type R joint which allows rotation about an axis that
is parallel to the joint 2 axis. Thus, we have a TRL: R manipulator.
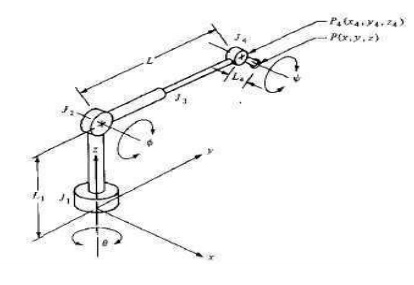
Let us define the angle
of rotation of joint I to be the base rotation 0; the angle of rotation of
joint 2 will be called the elevation angle 4.; the length of linear joint 3
will be called the extension L (L-represents a combination of links 2 and 3);
and the angle that joint 4 makes with the x — y plane will be called the pitch
angle 4.
The
position of the end of the wrist, P, defined in the world coordinate system for
the robot, is given by
Related Topics