Chapter: Microprocessor and Microcontroller : Micro Controller Programming & Applications
Micro Controller Programming
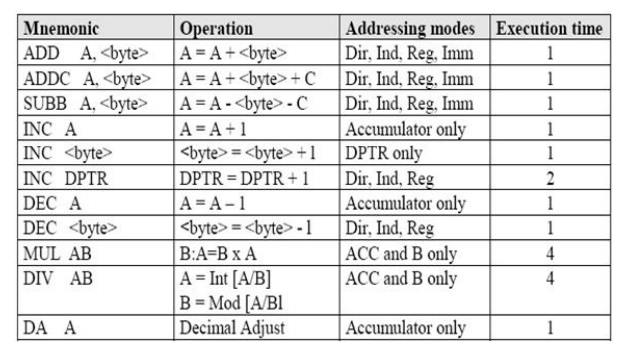
1 Arithmetic Instructions
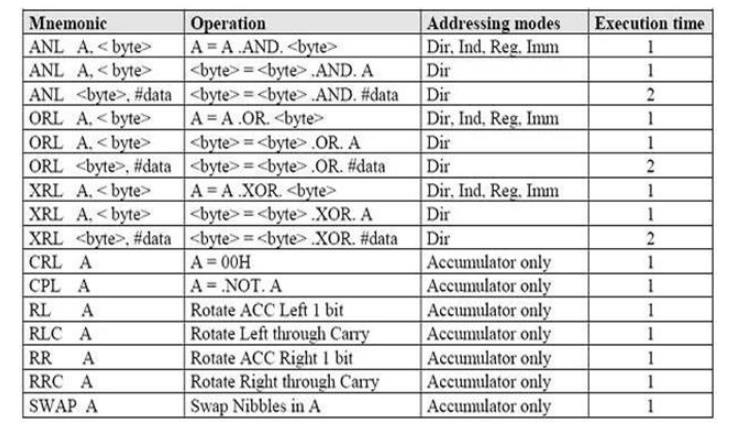
2 Logical Instructions
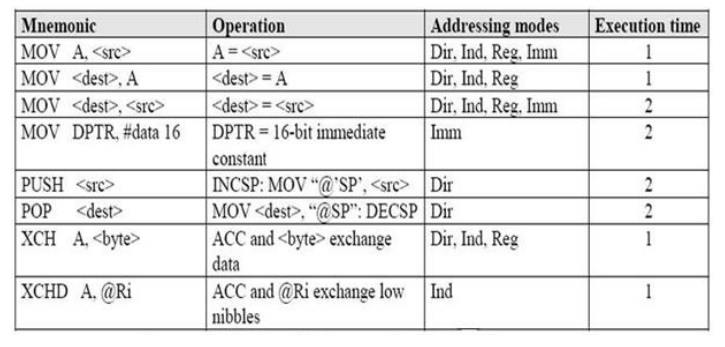
3 Data Transfer Instructions that
access the Internal Data Memory
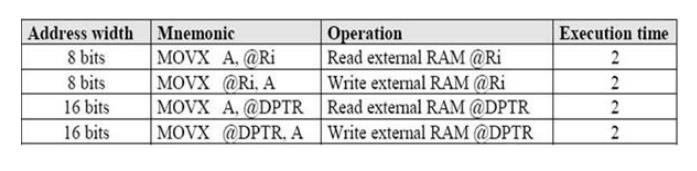
4 Data Transfer Instructions that
access the External Data Memory
5 Look up Tables

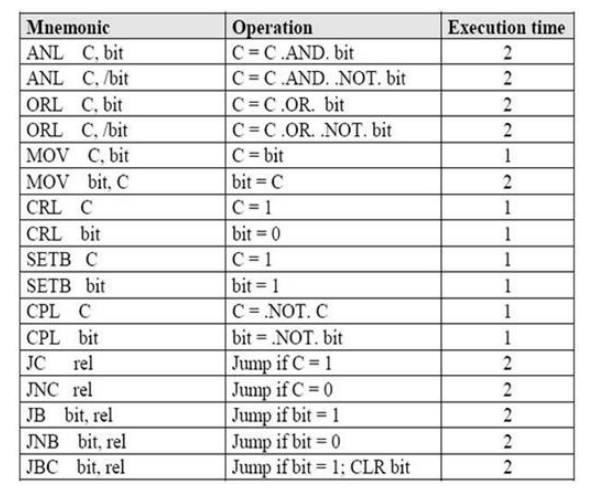
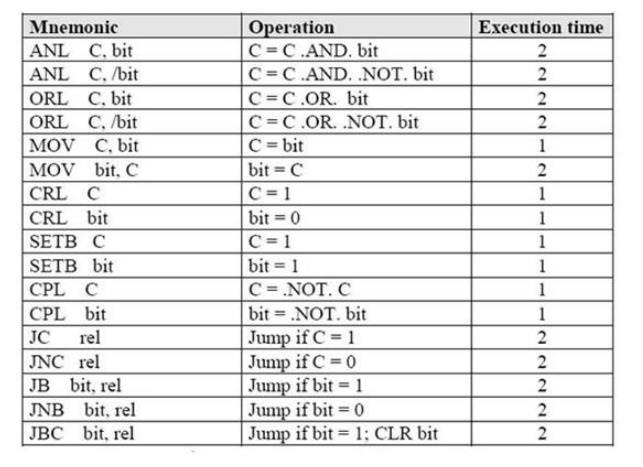
6 Boolean Instructions
7 Jump Instructions
Program
Filename
: pwm_servos.h
Hardware
: Controller -> P89V51RD2
XTAL ->
18.432 MHz
Mode ->
6 Clock/MC
I/O : P1.4 ->
Left (PWM-CEX1)
P1.5 ->
Right (PWM-CEX2)
Compiler
: SDCC
/*
Control the Left servo */
void
ServoL_back()
{
CCAP1H =
243;
}
void
ServoL_forward()
{
CCAP1H =
230;
}
void
ServoL_stop()
{
CCAP1H =
0;
}
/*
Control the Right servo */ void ServoR_back()
{
CCAP2H =
230;
}
void
ServoR_forward()
{
CCAP2H =
243;
}
void
ServoR_stop()
{
CCAP2H =
0;
}
/*
Initialize the PCA and PWM mode */ void Servos_init()
{
/* Initial
Timer0 Generate Overflow PCA */
TMOD =
0x02; /* Timer0 Mode2 : 8bit auto
reload */
TH0 = 16;
/* 256-240, 8.125usec Auto-relead (20msec/PWM) */ TL0 = TH0; TCON = 0x10; /*
setb TR0, TCON or 0001,0000*/
/*Initial
PWM Period = 20mS (18.432MHz /6-Cycle Mode) Initial PCA Count From Timer0
Overflow 1 Cycle of Timer0 = (1/18.432MHz)x6 = 0.326uS Timer0 AutoReload = 240
Cycle = 78.125uS 1 Cycle PCA = [(1/18.432MHz)x6]x240 = 78.125uS Period 20mS of
PCA = 20ms/78.125us = 256(CL Reload) CL(20mS) = 256 Cycle Auto Reload Load
CCAPxH(1.0mS) = 256-13 = 243 (243,244,...,255 = 13 Cycle) Load CCAPxH(2.0mS) =
255-26 = 230 (230,231,...,255 = 26 Cycle)*/
CMOD=0x04;
CCAPM1=0x42; CCAPM2=0x42; CCAP1H=0x00; CCAP2H=0x00; CCON=0x40;
}
test.c
#include
<p89v51rd2.h> #include "pwm_servos.h" void PowerOn()
{
unsigned
char inner, outer; IE = 0x00;
P1 =
0xFF; /* Motor STOP */
for
(outer = 0x00; outer < 0x10; outer++) { /* Delay for a while */ for (inner =
0x00; inner < 0xFF; inner++);
}
Servos_init();
IE =
0x80; /* Start interrupt */
}
void
main()
{
PowerOn();
ServoR_forward();
ServoL_back(); while (1);
}
Related Topics