Operations Research - Linear programming problem | 11th Business Mathematics and Statistics(EMS) : Chapter 10 : Operations Research
Chapter: 11th Business Mathematics and Statistics(EMS) : Chapter 10 : Operations Research
Linear programming problem
Linear programming
problem
The
Russian Mathematician L.V. Kantorovich applied mathematical model to solve
linear programming problems. He pointed out in 1939 that many classes of
problems which arise in production can be defined mathematically and therefore
can be solved numerically. This decision making technique was further developed
by George B. Dantziz. He formulated the general linear programming problem and
developed simplex method (1947) to solve complex real time applications. Linear
programming is one of the best optimization technique from theory, application
and computation point of view.
Definition:
Linear
Programming Problem(LPP) is a mathematical technique which is used to optimize
(maximize or minimize) the objective function with the limited resources.
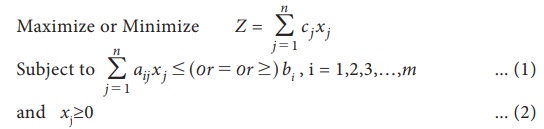
Mathematically,
the general linear programming problem (LPP) may be stated as follows.
Maximize or Minimize Z = c1
x1 + c2 x2
+ … + cn xn
Subject
to the conditions (constraints)
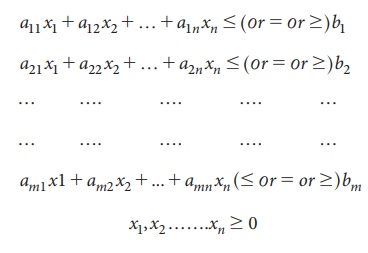
Short form of LPP
Some useful definitions:
Objective function:
A function
Z=c1
x1 + c2x2
+ …+ cnxn which
is to be optimized (maximized or minimized) is called objective function.
Decision variable:
The
decision variables are the variables, which has to be determined xj , j = 1,2,3,…,n, to
optimize the objective function.
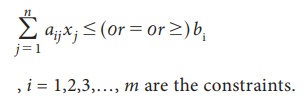
Constraints:
There are
certain limitations on the use of limited resources called constraints.
Solution:
A set of
values of decision variables xj,
j=1,2,3,…, n satisfying all the constraints of the problem is called a
solution to that problem.
Feasible solution:
A set of
values of the decision variables that satisfies all the constraints of the
problem and non-negativity restrictions is called a feasible solution of the
problem.
Optimal solution:
Any
feasible solution which maximizes or minimizes the objective function is called
an optimal solution.
Feasible region:
The
common region determined by all the constraints including non-negative
constraints xj ≥0 of a
linear programming problem is called the feasible region (or solution region)
for the problem.
Related Topics