Chapter: Communication Theory : Random Process
Linear Filtering of Random Processes
LINEAR FILTERING OF RANDOM
PROCESSES:
• A
random process X(t) is applied as input to a linear time-invariant filter of
impulse response h(t),
• It
produces a random process Y (t) at the filter output as

•
Difficult to describe the probability distribution of the output random process
Y (t), even when the probability distribution of the input random process X(t)
is completely specified for −∞ ≤ t ≤ +∞.
• Estimate
characteristics like mean and autocorrelation of the output and try to analyse
its behaviour.
• Mean The
input to the above system X(t) is assumed stationary. The mean of the output
random process Y (t) can be calculated
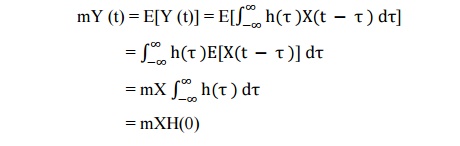
where
H(0) is the zero frequency response of the system.
ü Autocorrelation:
The
autocorrelation function of the output random process Y (t). By definition, we
have
RY (t, u)
= E[Y (t)Y (u)]
where t
and u denote the time instants at which the process is observed. We may
therefore use the convolution integral to write

When the
input X(t) is a wide-stationary random process, autocorrelation function of
X(t) is only a function of the difference between the observation times t − τ1
and u − τ2.
Putting τ
= t − u, we get

The mean
square value of the output random process Y (t) is obtained by putting τ = 0 in
the above equation.

The mean
square value of the output of a stable linear time-invariant filter in response
to a wide-sense stationary random process is equal to the integral over all
frequencies.
of the
power spectral density of the input random process multiplied by the squared
magnitude of the transfer function of the filter.
Related Topics