Chapter: Advanced Computer Architecture : Instruction Level Parallelism
Instruction-Level Parallelism: Concepts and Challenges
Instruction-Level Parallelism:
Concepts and Challenges:
Instruction-level
parallelism (ILP) is the potential overlap the execution of instructions using
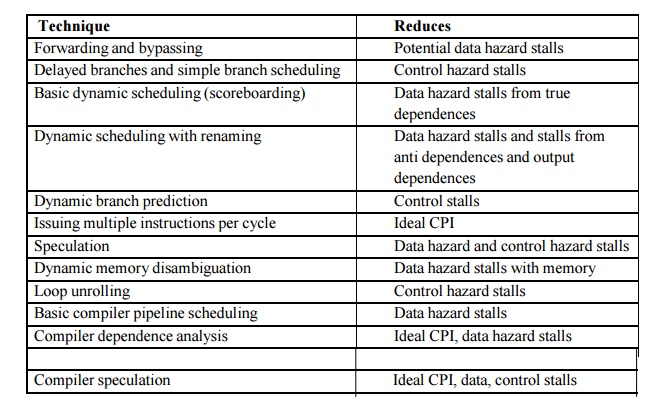
pipeline concept to improve performance of the system. The various techniques
that are used to increase amount of parallelism are reduces the impact of data
and control hazards and increases processor ability to exploit parallelism
There are
two approaches to exploiting ILP.
1. Static Technique – Software Dependent
2. Dynamic Technique – Hardware Dependent
The
simplest and most common way to increase the amount of parallelism is
loop-level parallelism. Here is a simple example of a loop, which adds two
1000- element arrays, that is completely parallel:
for (i=1;i<=1000; i=i+1) x[i] =
x[i] + y[i];
CPI
(Cycles per Instruction) for a pipelined processor is the sum of the base CPI
and all contributions from stalls:
Pipeline
CPI = Ideal pipeline CPI + Structural stalls + Data hazard stalls + Control
stalls
The ideal
pipeline CPI is a measure of the maximum performance attainable by the
implementation. By reducing each of the terms of the right-hand side, we
minimize the overall pipeline CPI and thus increase the IPC (Instructions per Clock).
1 Various types of Dependences in
ILP.
Data Dependence and Hazards:
To
exploit instruction-level parallelism, determine which instructions can be
executed in parallel. If two instructions are parallel, they can execute
simultaneously in a pipeline without causing any stalls. If two instructions
are dependent they are not parallel and must be executed in order.
There are
three different types of dependences: data dependences (also called true data
dependences), name dependences, and control dependences.
Data Dependences:
An
instruction j is data dependent on instruction i if either of the following
holds:
• Instruction
i produces a result that may be used by instruction j, or
• Instruction
j is data dependent on instruction k, and instruction k is data dependent on
instruction
i.
The
second condition simply states that one instruction is dependent on another if
there exists a chain of dependences of the first type between the two
instructions. This dependence chain can be as long as the entire program.
For
example, consider the following code sequence that increment a vector of values
in memory (starting at 0(R1) and with the last element at 8(R2)) by a scalar in
register F2:
Loop: L.D F0,0(R1) ; F0=array
element
ADD.D F4,F0,F2 ; add scalar in F2
S.D F4,0(R1) ; store
result
DADDUI R1,R1,#-8 ; decrement
pointer 8 bytes
BNE R1,R2,LOOP ; branch R1!=zero
The
dependence implies that there would be a chain of one or more data hazards
between the two instructions. Executing the instructions simultaneously will
cause a processor with pipeline interlocks to detect a hazard and stall,
thereby reducing or eliminating the overlap. Dependences are a property of
programs.
Whether a
given dependence results in an actual hazard being detected and whether that
hazard actually causes a stall are properties of the pipeline organization.
This difference is critical to understanding how instruction-level parallelism
can be exploited.
The
presence of the dependence indicates the potential for a hazard, but the actual
hazard and the length of any stall is a property of the pipeline. The
importance of the data dependences is that a dependence
(1) indicates
the possibility of a hazard,
(2) Determines
the order in which results must be calculated, and
(3) Sets an
upper bound on how much parallelism can possibly be exploited.
Name Dependences
The name
dependence occurs when two instructions use the same register or memory
location, called a name, but there is no flow of data between the instructions
associated with that name.
There are
two types of name dependences between an instruction i that precede instruction
j in program order:
• An
antidependence between instruction i and instruction j occurs when instruction
j writes a register or memory location that instruction i reads. The original
ordering must be preserved to ensure that i reads the correct value.
• An output
dependence occurs when instruction i and instruction j write the same register
or memory location. The ordering between the instructions must be preserved to
ensure that the value finally written corresponds to instruction j.
Both
anti-dependences and output dependences are name dependences, as opposed to true
data dependences, since there is no value being transmitted between the
instructions. Since a name dependence is not a true dependence, instructions
involved in a name dependence can execute simultaneously or be reordered, if
the name (register number or memory location) used in the instructions is
changed so the instructions do not conflict.
This
renaming can be more easily done for register operands, where it is called
register renaming. Register renaming can be done either statically by a
compiler or dynamically by the hardware. Before describing dependences arising
from branches, let’s examine the relationship between dependences and pipeline
data hazards.
Control Dependences:
A control
dependence determines the ordering of an instruction, i, with respect to a
branch instruction so that the instruction i is executed in correct program
order. Every
Instruction,
except for those in the first basic block of the program, is control dependent
on some set of branches, and, in general, these control dependences must be
preserved to preserve
program
order. One of the simplest examples of a control dependence is the dependence
of the statements in the “then” part of an if statement on the branch. For
example, in the code segment:
if p1 { S1; };
if p2 { S2;}
S1 is
control dependent on p1, and S2is control dependent on p2 but not on p1. In
general, there are two constraints imposed by control dependences:
1. An
instruction that is control dependent on a branch cannot be moved before the
branch so that its execution is no longer controlled by the branch. For
example, we cannot take an instruction from the then-portion of an if-statement
and move it before the ifstatement.
2. An
instruction that is not control dependent on a branch cannot be moved after the
branch so that its execution is controlled by the branch. For example, we
cannot take a statement before the if-statement and move it into the
then-portion.
Control
dependence is preserved by two properties in a simple pipeline, First,
instructions execute in program order. This ordering ensures that an
instruction that occurs before a branch is executed before the branch. Second,
the detection of control or branch hazards ensures that an instruction that is
control dependent on a branch is not executed until the branch direction is
known.
2. Data Hazard and various
hazards in ILP.
Data Hazards
A hazard
is created whenever there is dependence between instructions, and they are
close enough that the overlap caused by pipelining, or other reordering of instructions,
would change the order of access to the operand involved in the dependence.
Because
of the dependence, preserve order that the instructions would execute in, if
executed sequentially one at a time as determined by the original source
program. The goal of both our software and hardware techniques is to exploit
parallelism by preserving program order only where it affects the outcome of
the program. Detecting and avoiding hazards ensures that necessary program
order is preserved.
Data
hazards may be classified as one of three types, depending on the order of read
and write accesses in the instructions.
Consider
two instructions i and j, with i occurring before j in program order. The
possible data hazards are RAW (read
after write) — j tries to read a source before i write it, so j incorrectly
gets the old value. This hazard is the most common type and corresponds to true
data dependence. Program order must be preserved to ensure that j receives the
value from i. In the simple common five-stage static pipeline a load
instruction followed by an integer ALU instruction that directly uses the load
result will lead to a RAW hazard.
WAW (write after write)
j tries
to write an operand before it is written by i. The writes end up being
performed in the wrong order, leaving the value written by i rather than the
value written by j in the destination. This hazard corresponds to output
dependence. WAW hazards are present only in pipelines that write in more than one
pipe stage or allow an instruction to proceed even when a previous instruction
is stalled. The classic five-stage integer pipeline writes a register only in
the WB stage and avoids this class of hazards.
WAR (write after read)
j tries
to write a destination before it is read by i, so i incorrectly gets the new
value. This hazard arises from antidependence. WAR hazards cannot occur in most
static issue pipelines even deeper pipelines or floating point pipelines
because all reads are early (in ID) and all writes are late (in WB). A WAR
hazard occurs either when there are some instructions that write results early
in the instruction pipeline, and other instructions that read a source late in
the pipeline or when instructions are reordered.
Related Topics