Chapter: Advanced Computer Architecture : Instruction Level Parallelism
Branch Prediction method
Branch
Prediction method
1. Static
Branch Prediction method
Static branch predictors are used in processors where the expectation is that branch behavior is highly predictable at compile-time; static prediction can also be used to assist dynamic predictors.
An architectural feature that supports static
branch predication, namely delayed branches. Delayed branches expose a pipeline
hazard so that the compiler can reduce the penalty associated with the hazard.
The effectiveness of this technique partly depends on whether we correctly
guess which way a branch will go. Being able to accurately predict a branch at
compile time is also helpful for scheduling data hazards. Loop unrolling is on
branches. Loop unrolling is on simple example of this; another example arises
from conditional selection branches.
Consider
the following code segment:
LD R1, 0(R2)
DSUBU R 1
, R 1 , R 3
BEQZ R1, L
OR R4, R5, R6
DADDU R10, R4, R3
L: DADDU R7,
R8, R9
The
dependence of the DSUBU and BEQZ on the LD instruction means that a stall will
be needed after the LD. Suppose this branch was almost always taken and that
the value of R7 was not needed on the fall-through path. Then we could increase
the speed of the program by moving the instruction DADD R7,R8,R9 to the
position after the LD. If the branch was rarely taken and that the value of R4
was not needed on the taken path, then we could contemplate moving the OR
instruction after the LD.
To perform these optimizations, we need to predict
the branch statically when we compile the program. There are several different
methods to statically predict branch behavior. The simplest scheme is to
predict a branch as taken. This scheme has an average misprediction rate that
is equal to the untaken branch frequency, which for the SPEC programs is 34%.
Unfortunately,
the misprediction rate ranges from not very accurate (59%) to highly accurate
(9%).
A better
alternative is to predict on the basis of branch direction, choosing
backward-going branches to be taken and forward-going branches to be not taken.
For some programs and compilation systems, the frequency of forward taken
branches may be significantly less than 50%, and this scheme will do better
than just predicting all branches as taken. In the SPEC programs, however, more
than half of the forward-going branches are taken. Hence, predicting all
branches as taken is the better approach.
A still more accurate technique is to predict
branches on the basis of profile information collected from earlier runs. The
key observation that makes this worthwhile is that the behavior of branches is
often bimodally distributed; that is, an individual branch is often highly
biased toward taken or untaken.
2. Reduce Branch Costs with Dynamic Hardware Prediction
2.1.
Basic
Branch Prediction and Branch-Prediction Buffers
Ø The
simplest dynamic branch-prediction scheme is a branch-pr ediction buffer or
branch history table.
Ø A
branch-prediction buffer is a small memory indexed by the lower portion of the
address of the branch instruction.
Ø The
memory contains a bit that says whether the branch was recently taken or not.
if the prediction is correct—it may have been put there by another branch that
has the same low-order address bits.
Ø The
prediction is a hint that is assumed to be correct, and fetching begins in the
predicted direction. If the hint turns out to be wrong, the prediction bit is
inverted and stored back.
Ø The
performance of the buffer depends on both how often the prediction is for the
branch of interest and how accurate the prediction is when it matches.
Ø This
simple one-bit prediction scheme has a performance shortcoming: Even if a
branch is almost always taken, we will likely predict incorrectly twice, rather
than once, when it is not taken.
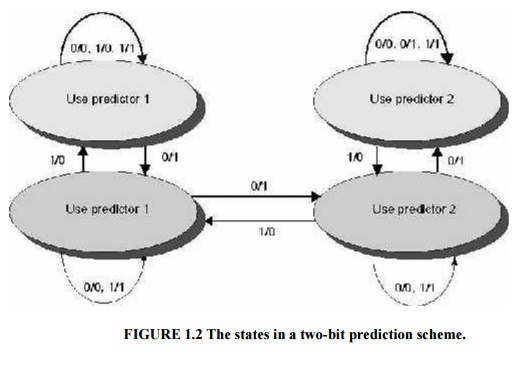
The two
bits are used to encode the four states in the system. In a counter
implementation, the counters are incremented when a branch is taken and
decremented when it is not taken; the counters saturate at 00 or 11.
One
complication of the two-bit scheme is that it updates the prediction bits more
often than a one-bit predictor, which only updates the prediction bit on a
mispredict. Since we typically read the prediction bits on every cycle, a
two-bit predictor will typically need both a read and a write access port.
The
two-bit scheme is actually a specialization of a more general scheme that has
an n-bit saturating counter for each entry in the prediction buffer. With an
n-bit counter, the counter can take on values between 0 and 2 n – 1:
when the counter is greater than or equal to one half of its maximum value (2 n-1),
the branch is predicted as taken; otherwise, it is predicted untaken.
To exploit more ILP, the accuracy of our branch
prediction becomes critical, this problem in two ways: by increasing the size
of the buffer and by increasing the accuracy of the scheme we use for each
prediction.
2.2. Correlating Branch Predictors:
These two-bit predictor schemes use only the recent
behavior of a single branch to predict the future behavior of that branch. It
may be possible to improve the prediction accuracy if we also look at the
recent behavior of other branches rather than just the branch we are trying to
predict.
Consider
a small code fragment from the SPEC92 benchmark
if (aa==2)
aa=0;
if
(bb==2) bb=0;
if
(aa!=bb) {
Here is the MIPS code that we would typically
generate for this code fragment assuming that aa and bb are assigned to
registers R1 and R2:
DSUBUI R3,
R1, #2
BNEZ R3,
L1; branch b1 (aa! =2)
DADD R1,
R0, R0; aa=0
L1: DSUBUI R3,
R2, #2
BNEZ R3,
L2; branch b2 (bb! =2)
DADD R2,
R0, R0; bb=0
L2: DSUBU R3,
R1, R2; R3=aa-bb
BEQZ R3,
L3; branch b3 (aa==bb)
Let’s label these branches b1, b2, and b3. The key
observation is that the behavior of branch b3 is correlated with the behavior
of branches b1 and b2. Clearly, if branches b1 and b2 are both not taken (i.e.,
the if conditions both evaluate to true and aa and bb are both assigned 0),
then b3 will be taken, since aa and bb are clearly equal. A predictor that uses
only the behavior of a single branch to predict the outcome of that branch can
never capture this behavior.
Branch predictors that use the behavior of other
branches to make a prediction are called correlating predictors or two-level
predictors.
2.3. Tournament Predictors: Adaptively Combining Local and Global
Predictors
The primary motivation for correlating branch
predictors came from the observation that the standard 2-bit predictor using
only local information failed on some important branches and that by adding
global information, the performance could be improved. Tournament predictors
take this insight to the next level, by using multiple predictors, usually one
based on global information and one based on local information, and combining
them with a selector. Tournament predictors can achieve both better accuracy at
medium sizes (8Kb-32Kb) and also make use of very large numbers of prediction
bits effectively.
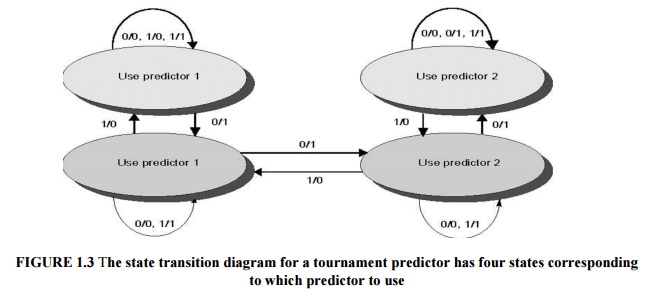
Tournament
predictors are the most popular form of multilevel branch predictors. A multilevel
branch predictor use several levels of branch prediction tables together with
an algorithm for choosing among the multiple predictors; Existing tournament
predictors use a 2-bit saturating counter per branch to choose among two
different predictors. The four states of the counter dictate whether to use
predictor 1 or predictor 2. The state transition diagram is shown in Figure 1.3
2.4. High Performance Instruction Delivery
Branch Target Buffers
A
branch-prediction cache that stores the predicted address for the next
instruction after a branch is called a branch-target buffer or branch-target
cache.
For the
classic, five-stage pipeline, a branch-prediction buffer is accessed during the
ID cycle, so that at the end of ID we know the branch-target address (since it
is computed during ID), the fall-through address (computed during IF), and the
prediction. Thus, by the end of ID we know enough to fetch the next predicted
instruction. For a branch-target buffer, we access the buffer during the IF
stage using the instruction address of the fetched instruction, a possible
branch, to index the buffer. If we get a hit, then we know the predicted
instruction address at the end of the IF cycle, which is one cycle earlier than
for a branch-prediction buffer.
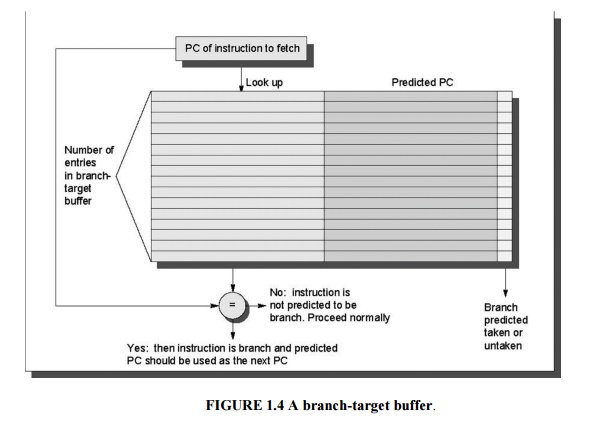
Because
we are predicting the next instruction address and will send it out before
decoding the instruction, we must know whether the fetched instruction is
predicted as a taken branch. Figure 1.4 shows what the branch-target buffer looks
like. If the PC of the fetched instruction matches a PC in the buffer, then the
corresponding predicted PC is used as the next PC.
If a
matching entry is found in the branch-target buffer, fetching begins
immediately at the predicted PC. Note that the entry must be for this
instruction, because the predicted PC will be sent out before it is known
whether this instruction is even a branch. If we did not check whether the
entry matched this PC, then the wrong PC would be sent out for instructions
that were not branches, resulting in a slower processor. We only need to store
the predicted-taken branches in the branch-target buffer, since an untaken
branch follows the same strategy as a non branch.
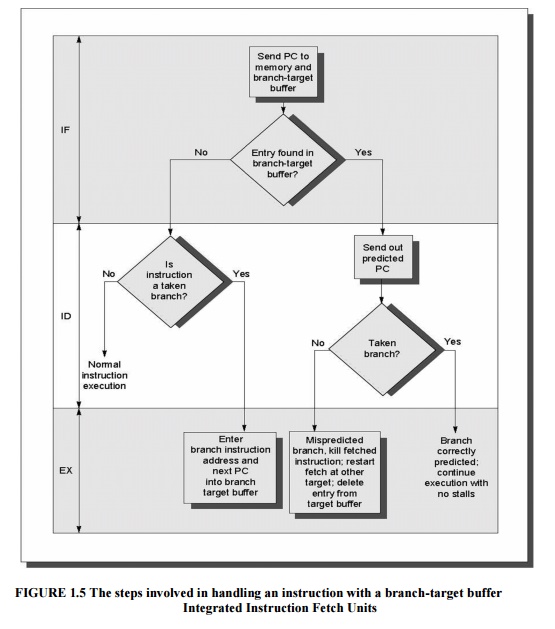
Figure
1.5 shows the steps followed when using a branch-target buffer and where these
steps occur in the pipeline. From this we can see that there will be no branch
delay if a branch-prediction entry is found in the buffer and is correct.
The
recent designs have used an integrated instruction fetch unit that integrates
several functions:
1. Integrated
branch prediction: the branch predictor becomes part of the instruction fetch
unit and is constantly predicting branches, so to drive the fetch pipeline.
2. Instruction
prefetch: to deliver multiple instructions per clock, the instruction fetch
unit will likely need to fetch ahead. The unit autonomously manages the
prefetching of instructions, integrating it with branch prediction.
3. Instruction
memory access and buffering:.The instruction fetch unit also provides
buffering, essentially acting as an on-demand unit to provide instructions to
the issue stage as needed and in the quantity needed
Return Address Predictors:
The
concept of a small buffer of return addresses operating as a stack is used to
predict the return address. This structure caches the most recent return
addresses: pushing a return address on the stack at a call and popping one off
at a return. If the cache is sufficiently large, it will predict the returns perfectly.
Related Topics