Chapter: Power Quality : Harmonics
Harmonics sources from industrial loads
Harmonics sources from industrial
loads:
Modern
industrial facilities are characterized by the widespread application of
nonlinear loads. These loads can make up a significant portion of the total
facility loads and inject harmonic currents into the power system, causing
harmonic distortion in the voltage. This harmonic problem is compounded by the
fact that these nonlinear loads have a relatively low power factor. Industrial
facilities often utilize capacitor banks to improve the power factor to avoid
penalty charges. The application of power factor correction capacitors can
potentially magnify harmonic currents from the nonlinear loads, giving rise to
resonance conditions within the facility. The highest voltage distortion level
usually occurs at the facility’s low-voltage bus where the capacitors are
applied. Resonance conditions cause motor and transformer overheating, and
misoperation of sensitive electronic equipment.
Nonlinear
industrial loads can generally be grouped into three categories: three-phase
power converters, arcing devices, and saturable devices. Sections 4.6.1 to
4.6.3 detail the industrial load characteristics.
1. Three-phase power converters
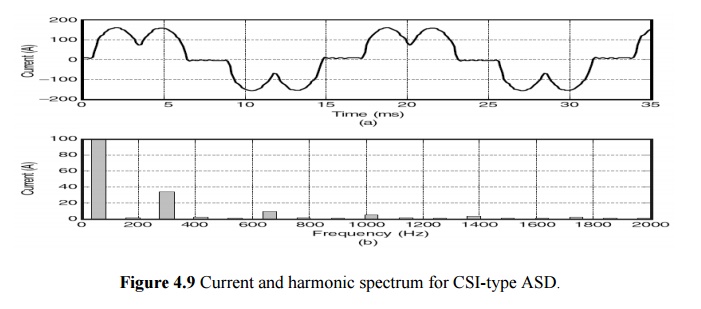
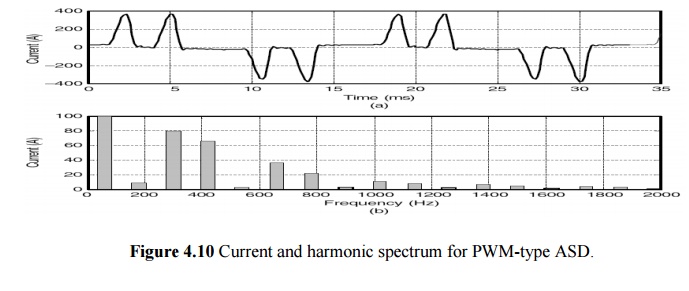
Three-phase electronic power converters differ from single-phase converters mainly because they do not generate third-harmonic currents. This is a great advantage because the third-harmonic current is the largest component of harmonics. However, they can still be significant sources of harmonics at their characteristic frequencies, as shown in Fig. 4.9. This is a typical current source type of adjustable-speed drive. The harmonic spectrum given in Fig. 4.9 would also be typical of a dc motor drive input current. Voltage source inverter drives (such as PWM-type drives) can have much higher distortion levels as shown in Fig. 4.10.
The input
to the PWM drive is generally designed like a three-phase version of the
switch-mode power supply in computers. The rectifier feeds directly from the ac
bus to a large capacitor on the dc bus. With little intentional inductance, the
capacitor is charged in very short pulses, creating the distinctive “rabbit
ear” ac-side current waveform with very high distortion. Whereas the
switch-mode power supplies are generally for very small loads, PWM drives are
now being applied for loads up to 500 horsepower (hp). This is a justifiable
cause for concern from power engineers.
2. DC drives.
Rectification
is the only step required for dc drives. Therefore, they have the advantage of relatively simple control
systems. Compared with ac drive systems, the dc drive offers a wider speed
range and higher starting torque. However, purchase and maintenance costs for
dc motors are high, while the cost of power electronic devices has been
dropping year after year. Thus, economic considerations limit use of the dc
drive to applications that require the speed and torque characteristics of the
dc motor.
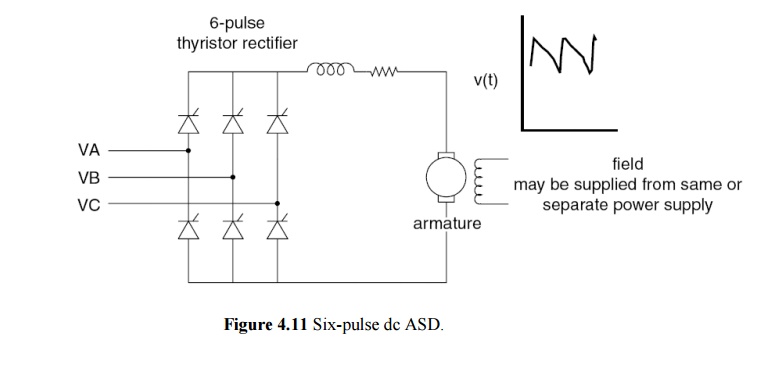
Most dc
drives use the six-pulse rectifier shown in Fig. 4.11. Large drives may employ
a 12-pulse rectifier. This reduces thyristor current duties and reduces some of
the larger ac current harmonics. The two largest harmonic currents for the
six-pulse drive are the fifth and seventh.
They are also the most troublesome in terms of system response. A 12-pulse rectifier in this application can be expected to eliminate about 90 percent of the fifth and seventh harmonics, depending on system imbalances. The disadvantages of the 12-pulse drive are that there is more cost in electronics and another transformer is generally required.
3. AC drives.
In ac
drives, the rectifier output is inverted to produce a variable-frequency ac voltage for the motor. Inverters are
classified as voltage source inverters (VSIs) or current source inverters (CSIs).
A VSI requires a constant dc (i.e., low-ripple) voltage input to the inverter
stage. This is achieved with a capacitor or LC
filter in the dc link. The CSI requires a constant current input; hence, a
series inductor is placed in the dc link.
AC drives
generally use standard squirrel cage induction motors. These motors are rugged,
relatively low in cost, and require little maintenance. Synchronous motors are
used where precise speed control is critical.
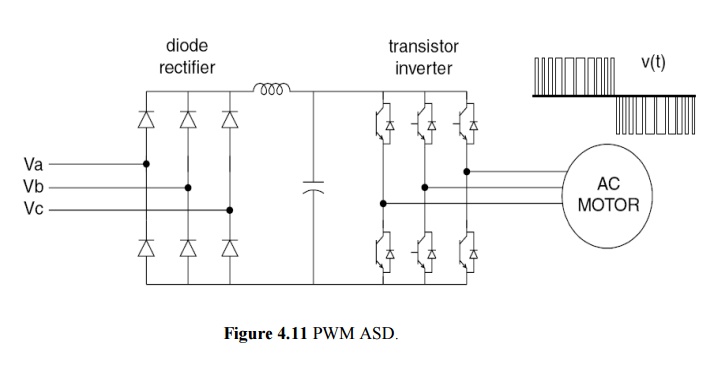
A popular
ac drive configuration uses a VSI employing PWM techniques to synthesize an ac
waveform as a train of variable-width dc pulses (see Fig. 4.11). The inverter
uses either SCRs, gate turnoff (GTO) thyristors, or power transistors for this
purpose. Currently, the VSI PWM drive offers the best energy efficiency for
applications over a wide speed range for drives up through at least 500 hp.
Another advantage of PWM drives is that, unlike other types of drives, it is
not necessary to vary rectifier output voltage to control motor speed. This
allows the rectifier thyristors to be replaced with diodes, and the thyristor
control circuitry to be eliminated.
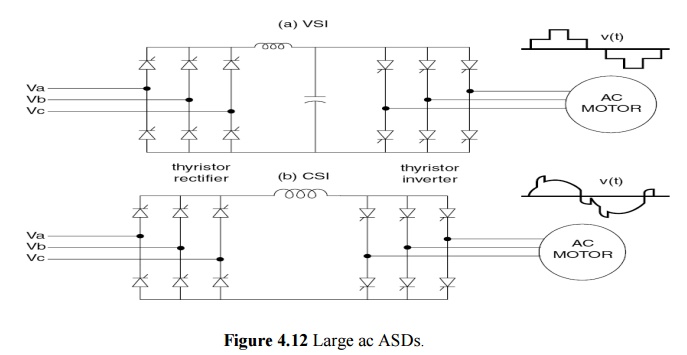
Very high
power drives employ SCRs and inverters. These may be 6- pulse, as shown in Fig.
4.12, or like large dc drives, 12-pulse. VSI drives (Fig. 4.12a) are limited to applications that do
not require rapid changes in speed. CSI drives (Fig. 4.12b) have good acceleration/deceleration characteristics but require
a motor with a leading power factor (synchronous or induction with capacitors)
or added control circuitry to commutate the inverter thyristors. In either
case, the CSI drive must be designed for use with a specific motor. Thyristors
in current source inverters must be protected against inductive voltage spikes,
which increases the cost of this type of drive.
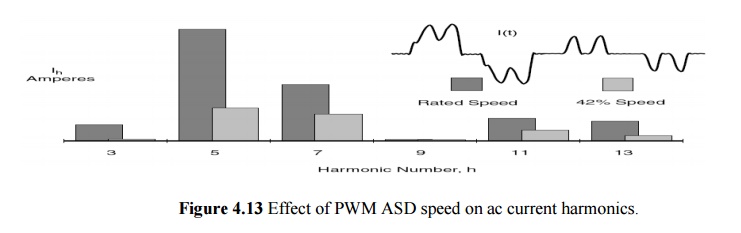
4. Impact of operating condition.
The
harmonic current distortion in adjustable-speed drives is not constant. The waveform changes significantly for different
speed and torque values. Figure 4.13 shows two operating conditions for a PWM
adjustablespeed drive. While the waveform at 42 percent speed is much more
distorted proportionately, the drive injects considerably higher magnitude
harmonic currents at rated speed. The bar chart shows the amount of current
injected. This will be the limiting design factor, not the highest THD.
Engineers should be careful to understand the basis of data and measurements
concerning these drives before making design decisions
5. Arcing devices
This
category includes arc furnaces, arc welders, and discharge-type lighting
(fluorescent, sodium vapor, mercury vapor) with magnetic
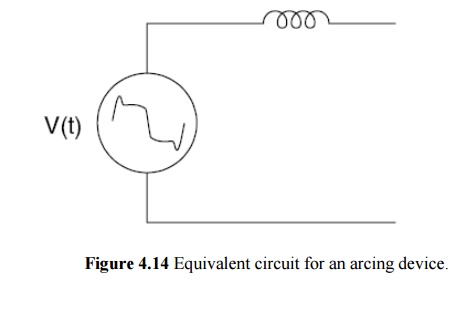
(rather
than electronic) ballasts. As shown in Fig. 4.14, the arc is basically a
voltage clamp in series with a reactance that limits current to a reasonable
value.
The
voltage-current characteristics of electric arcs are nonlinear. Following arc
ignition, the voltage decreases as the arc current increases, limited only by
the impedance of the power system. This gives the arc the appearance of having
a negative resistance for a portion of its operating cycle such as in
fluorescent lighting applications.
In
electric arc furnace applications, the limiting impedance is primarily the
furnace cable and leads with some contribution from the power system and
furnace transformer. Currents in excess of 60,000 A are common.
The
electric arc itself is actually best represented as a source of voltage
harmonics. If a probe were to be placed directly across the arc, one would
observe a somewhat trapezoidal waveform. Its magnitude is largely a function of
the length of the arc. However, the impedance of ballasts or furnace leads acts
as a buffer so that the supply voltage is only moderately distorted. The arcing
load thus appears to be a relatively stable harmonic current source, which is
adequate for most analyses. The exception occurs when the system is near
resonance and a Thevenin equivalent model using the arc voltage waveform gives
more realistic answers.
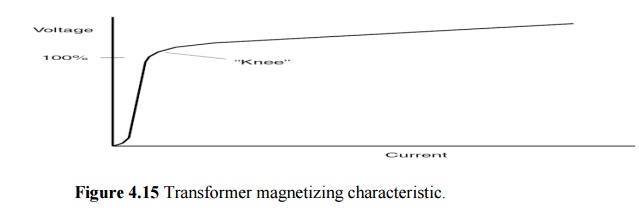
6. Saturable devices
Equipment
in this category includes transformers and other electromagnetic devices with a
steel core, including motors. Harmonics are generated due to the nonlinear
magnetizing characteristics of the steel (see Fig. 4.15).
Power
transformers are designed to normally operate just below the “knee” point of
the magnetizing saturation characteristic. The operating flux density of a
transformer is selected based on a complicated optimization of steel cost,
no-load losses, noise, and numerous other factors. Many electric utilities will
penalize transformer vendors by various amounts for no-load and load losses,
and the vendor will try to meet the specification with a transformer that has
the lowest evaluated cost. A high-cost penalty on the no-load losses or noise
will generally result in more steel in the core and a higher saturation curve
that yields lower harmonic currents.
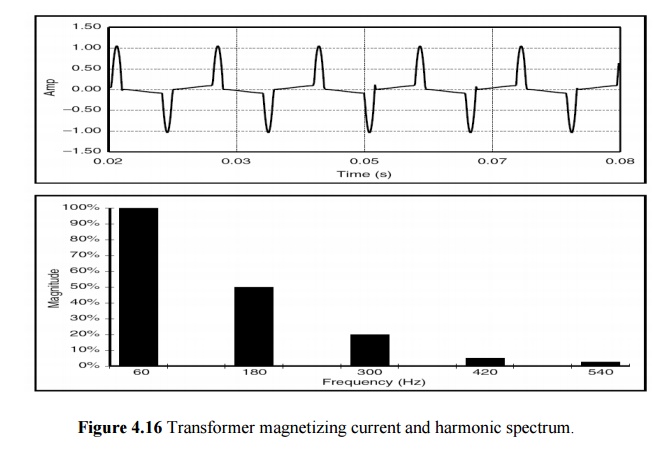
Although
transformer exciting current is rich in harmonics at normal operating voltage
(see Fig. 4.16), it is typically less than 1 percent of rated full load
current. Transformers are not as much of a concern as electronic power
converters and arcing devices which can produce harmonic currents of 20 percent
of their rating, or higher. However, their effect will be noticeable,
particularly on utility distribution systems, which have hundreds of
transformers. It is common to notice a significant increase in triplen harmonic
currents during the early morning hours when the load is low and the voltage
rises. Transformer exciting current is more visible then because there is
insufficient load to obscure it and the increased voltage causes more current
to be produced. Harmonic voltage distortion from transformer over excitation is
generally only apparent under these light load conditions.
Some
transformers are purposefully operated in the saturated region. One example is
a triplen transformer used to generate 180 Hz for induction furnaces.
Motors
also exhibit some distortion in the current when overexcited, although it is
generally of little consequence. There are, however, some fractional
horsepower, single-phase motors that have a nearly triangular waveform with
significant third-harmonic currents.
Related Topics