Chapter: Control Systems : Systems and their Representation
DC Servo Motor - Control Systems
DC Servo Motor
A DC servo motor is used as an actuator to drive a load. It is usually a DC motor of low power rating.
DC servo motors have a high ratio of starting torque to inertia and therefore they have a faster dynamic response.
DC motors are constructed using rare earth permanent magnets which have high residual flux density and high coercively.
As no field winding is used, the field copper losses am zero and hence, the overall efficiency of the motor is high.
The speed torque characteristic of this motor is flat over a wide range, as the armature reaction is negligible.
Moreover speed in directly proportional to the armature voltage for a given torque. Armature of a DC servo motor is specially designed to have low inertia.
In some application DC servo motors are used with magnetic flux produced by field windings.
The speed of PMDC motors can be controlled by applying variable armature voltage. These are called armature voltage controlled DC servo motors.
Wound field DC motors can be controlled by either controlling the armature voltage or controlling rho field current. Let us now consider modelling of these two types or DC servo motors.
(a) Armature controlled DC servo motor
The physical model of an armature controlled DC servo motor is given in
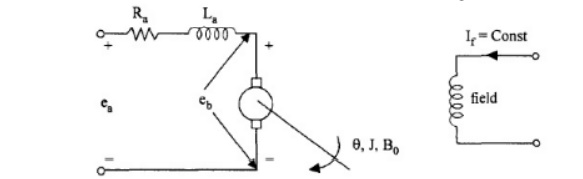
The armature winding has a resistance R a and inductance La.
The field is produced either by a permanent magnet or the field winding is separately excited and supplied with constant voltage so that the field current If is a constant.
When the armature is supplied with a DC voltage of e a volts, the armature rotates and produces a back e.m.f eb.
The armature current ia depends on the difference of eb and en. The armature has a permanent of inertia J, frictional coefficient B0
The angular displacement of the motor is 8.
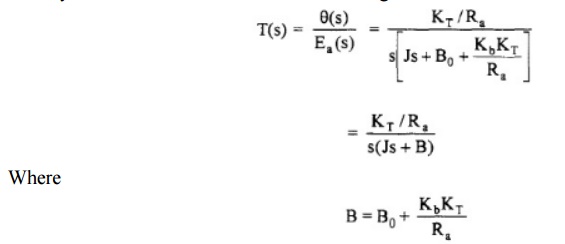
The torque produced by the motor is given by

Where K T is the motor torque constant.
The back emf is proportional to the speed of the motor and hence
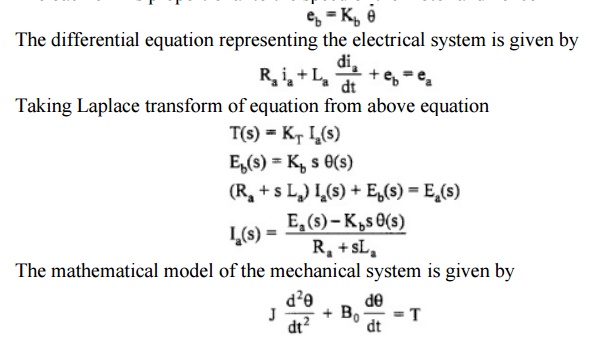
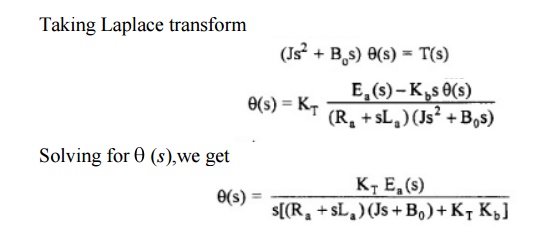
The block diagram representation of the armature controlled DC servo motor is developed in Steps
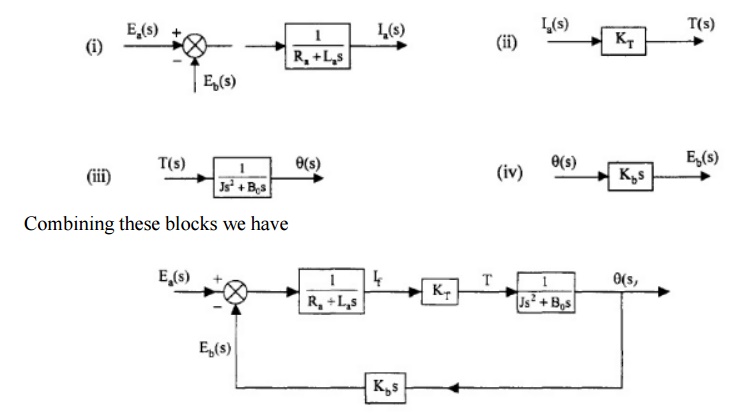
Usually the inductance of the armature winding is small and hence neglected
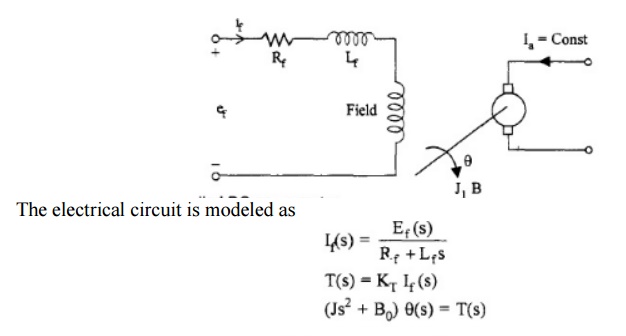
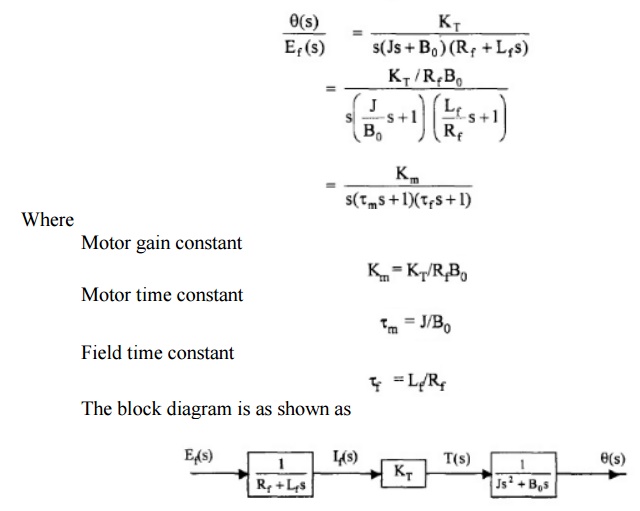
Field Controlled Dc Servo Motor
The field servo motor
Related Topics