Chapter: Computer Networks : Network Layer
Unicast Routing Protocols
Unicast Routing Protocols
A routing
table can be either static or dynamic. A static table is one with manual
entries. A dynamic table, on the
other hand, is one that is updated automatically when there is a change
somewhere in the internet. Today, an internet needs dynamic routing tables. The
tables need to be updated as soon as there is a change in the internet. For
instance, they need to be updated when a router is down, and they need to be
updated whenever a better route has been found.
1. Optimization
A router
receives a packet from a network and passes it to another network. A router is
usually attached to several networks. One approach is to assign a cost for
passing through a network. We call this cost a metric. However, the metric
assigned to each network depends on the type of protocol. Some simple
protocols, such as the Routing Information Protocol (RIP), treat all networks
as equals. The cost of passing through a network is the same; it is one hop
count. So
if a packet passes through 10 networks to reach the destination, the total cost
is 10 hop counts.
2. Intra- and Inter-domain
Routing
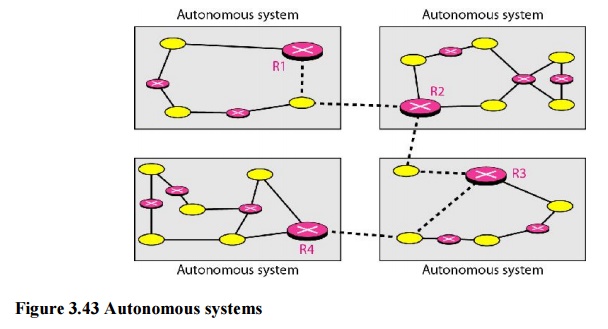
An
internet can be so large that one routing protocol cannot handle the task of
updating the routing tables of all routers. For this reason, an internet is
divided into autonomous systems. An autonomous system (AS) is a group of
networks and routers under the authority of a single administration. Routing
inside an autonomous system is referred to as intradomain routing. Routing
between autonomous systems is referred to as interdomain routing
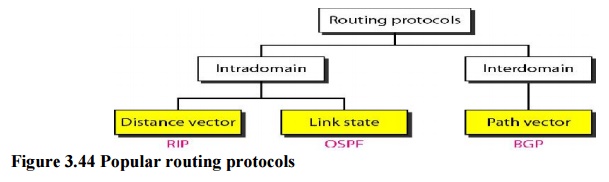
Several
intradomain and interdomain routing protocols are in use.
O Two intradomain routing
protocols: Distance vector and link state.
O One interdomain routing protocol:
path vector.
Routing
Information Protocol (RIP) is an implementation of the distance vector
protocol. Open Shortest Path First (OSPF) is an implementation of the link
state protocol. Border Gateway Protocol (BGP) is an implementation of the path
vector protocol.
3. Distance Vector Routing
In
distance vector routing, the least-cost route between any two nodes is the
route with minimum distance. In this protocol, as the name implies, each node
maintains a vector (table) of minimum distances to every node. The table at
each node also guides the packets to the desired node by showing the next stop
in the route (next-hop routing).
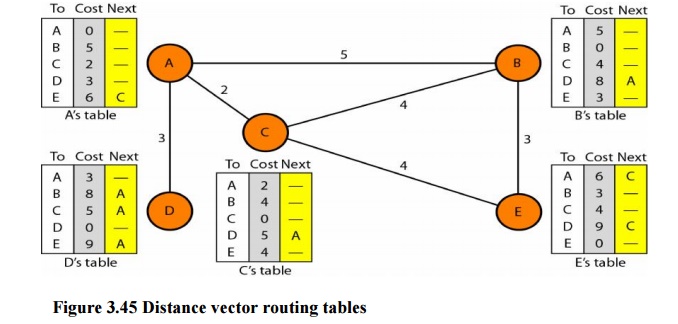
The table
for node A shows how we can reach any node from this node. For example, our least
cost to reach node E is 6. The route passes through C.
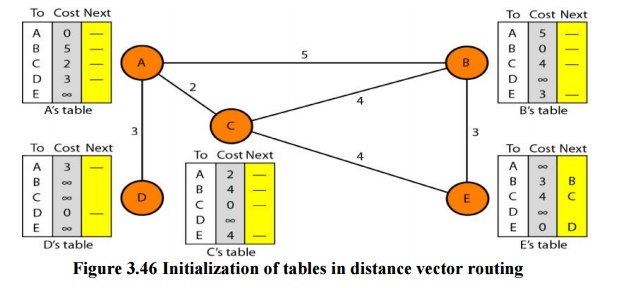
Initialization
The
tables in Figure 3.45 are stable; each node knows how to reach any other node
and the cost. At the beginning, however, this is not the case. Each node can
know only the distance between itself and its immediate neighbors, those
directly connected to it. So for the moment, we assume that each node can send
a message to the immediate neighbors and find the distance between itself and
these neighbors. The distance for any entry that is not a neighbor is marked as
infinite (unreachable).
Sharing
The whole
idea of distance vector routing is the sharing of information between
neighbors. Although node A does not know about node E, node C does. So if node
C shares its routing table with A, node A can also know how to reach node E. On
the other hand, node C does not know how to reach node D, but node A does. If
node A shares its routing table with node C, node C also knows how to reach
node D. In other words, nodes A and C, as immediate neighbors, can improve
their routing tables if they help each other.
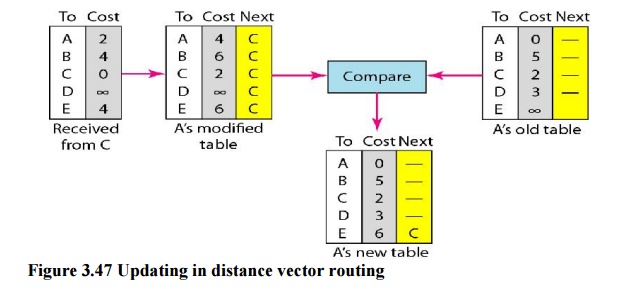
Updating
When a
node receives a two-column table from a neighbor, it needs to update its
routing table. Updating takes three steps:
1. The
receiving node needs to add the cost between itself and the sending node to
each value in the second column. The logic is clear. If node C claims that its
distance to a destination is x mi,
and the distance between A and C is y
mi, then the distance between A and that destination, via C, is x + y
mi.
2. The
receiving node needs to add the name of the sending node to each row as the
third column if the receiving node uses information from any row. The sending
node is the next node in the route.
3. The
receiving node needs to compare each row of its old table with the
corresponding row of the modified version of the received table.
a)
If the next-node entry is different, the receiving
node chooses the row with the smaller cost. If there is a tie, the old one is
kept.
b) If the
next-node entry is the same, the receiving node chooses the new row. For
example, suppose node C has previously advertised a route to node X with
distance 3.
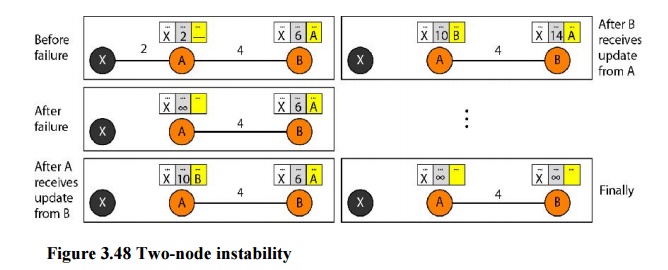
Two-Node Loop Instability
A problem
with distance vector routing is instability, which means that a network using
this protocol can become unstable. To understand the problem, let us look at
the scenario depicted.
Defining Infinity The first
obvious solution is to redefine infinity to a smaller number, such as100. For
our previous scenario, the system will be stable in less than 20 update s. As a
matter of fact, most implementations of the distance vector protocol define the
distance between each node to be I and define 16 as infinity. However, this
means that the distance vector routing cannot be used in large systems. The
size of the network, in each direction, cannot exceed 15 hops.
Split Horizon Another solution is called split
horizon. In this strategy, instead of flooding thetable through each interface,
each node sends only part of its table through each interface. If, according to
its table, node B thinks that the optimum route to reach X is via A, it does
not need to advertise this piece of information to A; the information has corne
from A (A already knows). Taking information from node A, modifying it, and sending
it back to node A creates the confusion. In our scenario, node B eliminates the
last line of its routing table before it sends it to A. In this case, node A
keeps the value of infinity as the distance to X.
4. Link State Routing
Link
state routing has a different philosophy from that of distance vector routing.
In link state routing, if each node in the domain has the entire topology of
the domain the list of nodes and links, how they are connected including the
type, cost (metric), and condition of the links (up or down)-the node can use
Dijkstra's algorithm to build a routing table.
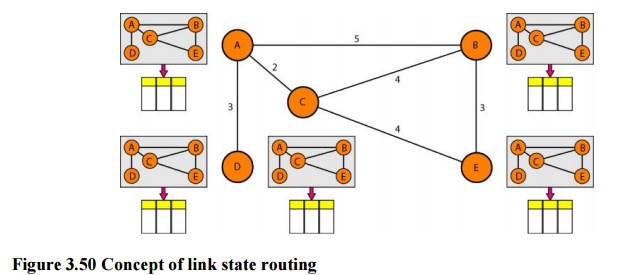
Figure 3.50 Concept of link state routing
The
figure shows a simple domain with five nodes. Each node uses the same topology
to create a routing table, but the routing table for each node is unique
because the calculations are based on different interpretations of the
topology. This is analogous to a city map. While each person may have the same
map, each needs to take a different route to reach her specific destination
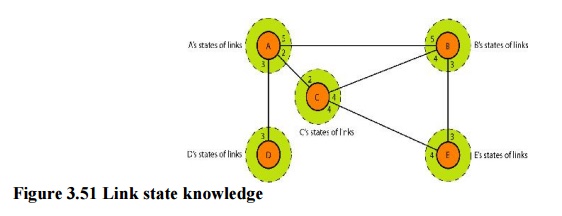
Building Routing Tables:
In link state routing, four sets
of actions are required to ensure that each node has therouting table showing
the least-cost node to every other node.
a) Creation
of the states of the links by each node, called the link state packet (LSP).
b)Dissemination
of LSPs to every other router, called flooding,
in an efficient and reliable way.
c) Formation
of a shortest path tree for each node.
d)Calculation
of a routing table based on the shortest path tree.
Types of Links
In OSPF
terminology, a connection is called a link.
Four types of links have been defined: point-to-point, transient, stub, and
virtual.
Figure 3.52 Types of links
A
point-to-point link connects two routers without any other host or router in
between. In other words, the purpose of the link (network) is just to connect
the two routers. An example of this type of link is two routers connected by a
telephone line or a T line. There is no need to assign a network address to
this type of link. Graphically, the routers are represented by nodes, and the
link is represented by a bidirectional edge connecting the nodes. The metrics,
which are usually the same, are shown at the two ends, one for each direction.
In other words, each router has only one neighbor at the other side of the
link.
5. Path Vector Routing
Distance
vector and link state routing are both intradomain routing protocols. They can
be used inside an autonomous system, but not between autonomous systems. These
two protocols are not suitable for interdomain routing mostly because of
scalability. Both of these routing protocols become intractable when the domain
of operation becomes large. Distance vector routing is subject to instability
if there are more than a few hops in the domain of operation. Link state
routing needs a huge amount of resources to calculate routing tables. It also
creates heavy traffic because of flooding. There is a need for a third routing
protocol which we call path vector routing.
Path
vector routing proved to be useful for interdomain routing. The principle of
path vector routing is similar to that of distance vector routing. In path
vector routing, we assume that there is one node in each autonomous system that
acts on behalf of the entire autonomous system.
Initialization
At the
beginning, each speaker node can know only the reach ability of nodes inside
its autonomous system
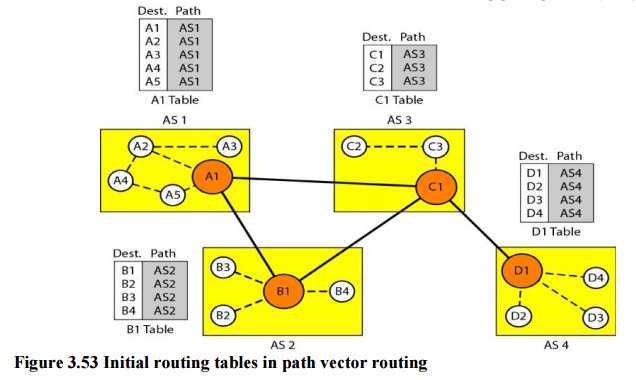
Figure 3.53 Initial routing tables in path vector
routing
Node Al
is the speaker node for AS1, B1 for AS2, C1 for AS3, and Dl for AS4. Node Al
creates an initial table that shows Al to A5 are located in ASI and can be
reached through it. Node B1 advertises that Bl to B4 are located in AS2 and can
be reached through Bl. And so on.
Related Topics