Chapter: Electric Energy Generation and Utilisation and Conservation : Electric Drives and Traction
Traction motors and control
Traction motors and control:
The control of traction motors for starting and for smooth acceleration is very much essential to avoid damage to the motors. The control equipment is provided for manual and automatic operation. Usually a master controller is used for the purpose.
1) D.C series motor control or plain rheostat control
2) Series –Parallel control
i. Open circuit transition
ii. Shunt transition control
iii. Bridge transition control
3.Metadyne control
4.Multiple unit control
Train Movement and Energy Consumption:
Speed-Time Curves:
The curve drawn between speed and time is called the speed-time-curve. The speed-time curve gives complete information of the motion of the train. The curve gives the speed at various instants after the start of run directly. Slop of the curve at any point gives the acceleration at the corresponding instant or speed. The area covered by the curve, the time axis and the ordinates through the instants between which the time is taken, represents the distance covered in the corresponding time interval.
Speed-time curve mainly consists of
1) Initial acceleration
(a) Constant acceleration or acceleration while notching up and
(b)Speed curve running or acceleration on the speed curve
2) Constant speed run or free run
3) Coasting and
4) Retardation or braking
1. Acceleration period:
From starting to the stage when locomotive attains maximum speed, the period is known as acceleration period, as the vehicle is constantly accelerated. This is represented by OA portion of the curve and time duration is t1.
2. Free running:
During this period the motor develops enough torque to overcome the friction and wind resistance and hence the locomotive runs at constant speed. This is shown by the portion AB of the curve.
3. Coasting:
When the locomotive is running at certain speed, if the motor is switch off, due to inertia the vehicle will continue to run, of course with little deceleration due to friction and windage.
4. Braking:
The locomotive is retarded to stop it within short distance and at a particular spot. The shape of the curve will change depending upon the distance between consecutive stations .
It is the curve drawn between speed of train in km/hour along y-axis and time in seconds along x-axis.
The speed time curve gives complete information of the motion of the train.
This curve gives the speed at various times after the start and run directly.
The distance travelled by the train during a given interval of time can be obtained by determining the area between the curve and the time axis corresponding to this interval.
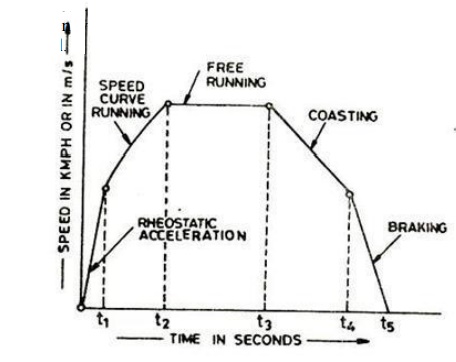
A typical speed time curve for main line service is shown in fig. This curve consists of five sections.
1. Notching up period (0 to t1)
During this period of run (0 to t1), starting resistance is gradually cut so that the motor current is limited to a certain value and the voltage across the motor is gradually increased and the traction motor accelerates from rest.
To cut the starting resistance, the starter handle has to be moved from one notch to another. Hence this period is called notching up period.
The acceleration is almost uniform during this period.
Now the torque decreases and speed increases according to the speed torque characteristics of the motor.
Now the acceleration gradually decreases with the increase in speed and finally reaches the required torque for the movement of the train (at time t2).
3. Free running period (t2to t3).
During this period i.e. t2 to t3 the power supplied to the motor is at full voltage and speed of this period is constant, also during this period Power drawn from the supply is constant.
4. Coasting period (t3to t4)
At the end of free running period supply to the motor is cut off and the train is allowed to run under its own kinetic energy.
Due to train resistance speed of the train gradually decreases.
The rate of decreasing of speed during this period is known as “coasting retardation”.
5. Braking or retardation period (t4to t5)
At the end of coasting period the brakes are applied to bring the train to stop.
During this period speed decreases rapidly and finally reduces to zero.
Types of services:
There are three types of electric traction services.
1. Main line service
2. Sub-urban service
3. Urban service
Speed – Time curve for suburban service
In this type of service the distance between two successive stations is in the range of 1.5 km to 8 km. Fig represents speed-time curve for sub-urban service.
Acceleration and braking retardation required are high.
Free running period is not possible and coasting period will be comparatively longer than urban service.
Speed – Time curve for urban or city service
In city service the distance between the two stations is very short i.e., between 0.75 to 1 km.
The time required for this run between the adjacent and retardation should be sufficient high.
Fig shows the speed-time curve for urban or city service. It will be seen that there will be no free running period.
The coasting period is also small.
Tractive effort:
The effective efforts required to run a train on track are
Tractive effort needed to provide acceleration (Fa)
Tractive effort needed to overcome the train resistance (Fr)
Tractive effort needed to overcome gradients (Fg)
Tractive effort for acceleration (F):
Acceleration = α km/hr/sec
= α x 1000/3600 m/sec2
When a train is accelerated in a linear direction, its rotating parts like the wheels and armature of motors have to be accelerated in an angular direction.
Therefore the accelerating mass of the train is greater than the dead mass of the train. Generally the effective or accelerating mass is 10% more than the dead mass.
i.e. Me = 1.1 M
Let the effective mass of train = Me ton
= 1000 Me kg.
Force required for acceleration = Mass x acceleration.
i.e., Fa= Mex a
= 1000 Mex α 1000/3600
= 277.8 Me α Newtons
Tractive effort to overcome the train resistance (Fr):
While moving, the train has to overcome the opposing force due to the surface friction and wind resistance.
The train resistance depends upon various factors such as shape, size, condition of track etc.
Tractive effort required to overcome the train resistance
Fr = M x r Newtons
Where M = Mass of train in tone
Consider that an electric train is moving upwards on a slope
The dead mass of the train along the slope will tend to bring it downward.
To overcome this effect of gravity, tractive effort are required in opposite direction.
Tractive effort to overcome the effect of gravity = Fg
Fg = Mg sin θ tone m/sec2
= 1000 Mg sin θ kg m/ sec2
= 1000 Mg sin Newton
Where g is the acceleration due to gravity
= 9.81 m/sec2
Θ is the angle of slope.
Fg = 1000 M x 9.81 sin θ Newton------------- (1)
In railway practice the gradient is expressed in terms of rise or fall in every 100 metres of track and it is denoted by G %
Gradient G = BC /(AC/100)
= (BC/AC) x 100
i.e., G = 100 sin θ
sin θ = G/100-------------------- (2)
Sub the value of sin in eqn (1)
Fg = 1000 M x 9.81 x G/100
Fg = ± 9.81 MG Newton
Positive sign is to be used for upgradient and negative sign for down gradient.
Related Topics