Chapter: Digital Signal Processing : Applications of DSP
Subband Coding
Subband Coding:
Another
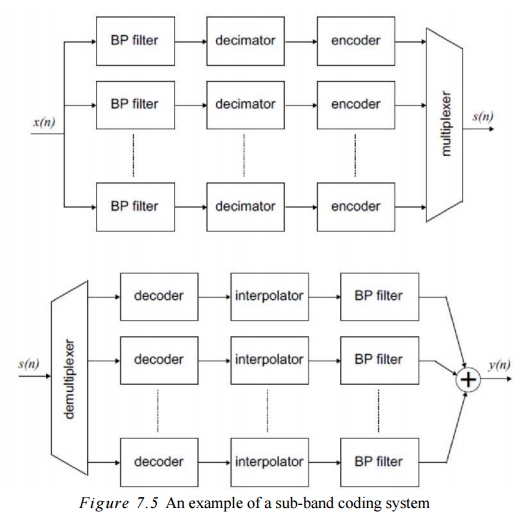
coding method is sub-band coding (SBC)
(see Figure 7.5) which belongs to the class of waveform coding methods, in which the frequency domain properties
of the input signal arc utilized to achieve data compression.
The basic
idea is that the input speech signal is split into sub-bands using band-pass filters. The sub-band signals arc then
encoded using ADPCM or other techniques. In this way, the available data
transmission capacity can be allocated between bands according to pcrccptual
criteria, enhancing the speech quality as pcrceivcd by listeners. A sub-band
that is more ‘important’ from the human listening point of view can be
allocated more bits in the data stream, while less important sub-bands will use
fewer bits.
A typical
setup for a sub-band codcr would be a bank of N(digital) bandpass filters followed by dccimators, encoders (for
instance ADPCM) and a multiplexer combining the data bits coming from the
sub-band channels. The output of the multiplexer is then transmitted to the
sub-band dccodcr having a demultiplexer splitting the multiplexed data stream
back into Nsub-band channels. Every
sub-band channel has a dccodcr (for instance ADPCM), followed by an
interpolator and a band-pass filter. Finally, the outputs of the band-pass
filters are summed and a reconstructed output signal results.
Sub-band
coding is commonly used at bit rates between 9.6 kbits/s and 32 kbits/s and
performs quite well. The complexity of the system may however be considerable
if the number of sub-bands is large. The design of the band-pass filters is
also a critical topic when working with sub-band coding systems.
Vocoders
and LPC
In the
methods described above (APC, SBC and ADPCM), speech signal applications have
been used as examples. By modifying the structure and parameters of the
predictors and filters, the algorithms may also be used for other signal types.
The main objective was to achieve a reproduction that was as faithful as
possible to the original signal. Data compression was possible by removing
redundancy in the time or frequency domain.
The class
of vocoders (also called source coders) is a special class of data compression
devices aimed only at spcech signals. The input signal is analysed and
described in terms of speech model parameters. These parameters are then used
to synthesize a voice pattern having an acceptable level of perceptual quality.
Hence, waveform accuracy is not the main goal, as in the previous methods
discussed.
The first
vocoder was designed by H. Dudley in the 1930s and demonstrated at the ‘New
York Fair’ in 1939* Vocoders have become popular as they achieve reasonably
good speech quality at low data rates, from 2A
kbits/s to 9,6 kbits/s. There arc many types of vocoders (Marvcn and Ewers,
1993), some of the most common techniques will be briefly presented below.
Most
vocoders rely on a few basic principles. Firstly, the characteristics of the
spccch signal is assumed to be fairly constant over a time of approximately 20
ms, hcncc most signal processing is performed on (overlapping) data blocks of
20 40 ms length. Secondly, the spccch model consists of a time varying filter
corresponding to the acoustic properties of the mouth and an excitation signal.
The cxeilalion signal is cither a periodic waveform, as crcatcd by the vocal
chords, or a random noise signal for production of ‘unvoiced' sounds, for
example ‘s’ and T. The filter parameters and excitation parameters arc assumed
to be independent of each other and are commonly coded separately.
Linear predictive coding (LPC) is a popular method, which has however been replaced by newer approaches in
many applications. LPC works exceed-ingly well at low bit rates and the LPC
parameters contain sufficient information of the spccch signal to be used in spccch
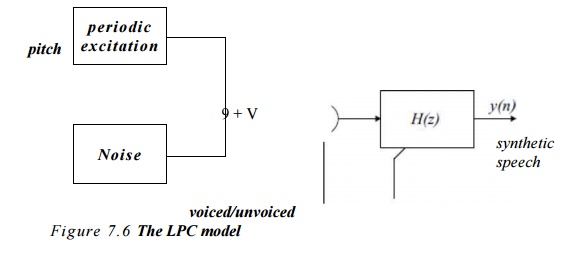
recognition applications. The LPC
model is shown in Figure 7*6.
LPC is
basically an autn-regressive model
(sec Chapter 5) and the vocal tract is modelled as a time-varying all-pole
filter (HR filter) having the transfer function H(z)
The
output sample at time n is a linear
combination of p previous samples and
the excitation signal (linear predictive coding). The filter coefficients ak arc time varying.
The model
above describes how to synthesize the
speech given the pitch information (if noise or pet iodic excitation should be
used), the gain and the filter parameters. These parameters must be determined
by the cncoder or the analyser, taking the original spccch signal x(n) as input.
The
analyser windows the spccch signal in blocks of 20-40 ms. usually with a
Hamming window (see Chapter 5). These blocks or ‘frames’ arc repeated every
10—30 ms, hence there is a certain overlap in time. Every frame is then
analysed with respect to the parameters mentioned above.
Firstly,
the pitch frequency is determined. This also tells whether we arc dealing with
a voiced or unvoiccd spccch signal. This is a crucial part of the system and
many pitch detection algorithms have been proposed. If the segment of the
spccch signal is voiced and has a dear periodicity or if it is unvoiced and not
pet iodic, things arc quite easy* Segments having properties in between these
two extremes are difficult to analyse. No algorithm has been found so far that
is 1perfect* for all listeners.
Now, the
second step of the analyser is to determine the gain and the filter parameters.
This is done by estimating the spccch signal using an adaptive predictor. The
predictor has the same structure and order as the filter in the synthesizer,
Hencc, the output of the predictor is
- i(n) —
- tf]jt(/7— 1) — a 2 x(n — 2) — ... —
OpX(n—p) (7-19)
where
i(rt) is the predicted input spcech signal and jc(rt) is the actual input
signal. The filter coefficients ak
are determined by minimizing the square error

This can
be done in different ways, cither by calculating the auto-corrc- lation
coefficients and solving the Yule Walker equations (see Chapter 5) or by using
some recursive, adaptive filter approach (see Chapter 3),
So, for
every frame, all the parameters above arc determined and irans - mittcd to the
synthesiser, where a synthetic copy of the spccch is generated.
An
improved version of LPC is residual
excited linear prediction (RELP).
Let us
take a closer look at the error or
residual signal r(fi) resulting from the prediction in the analyser (equation
(7.19)). The residual signal (wc arc try ing to minimize) can be expressed as
r(n)= *(«) -i(rt)
= jf(rt)
+ a^x(n— 1) + a2 x(n — 2) -h
*.. + ap x(ft—p) <7-21) From this it is
straightforward to find out that the corresponding expression using the
z-transforms is
Hence,
the prcdictor can be regarded as an ‘inverse’ filter to the LPC model filter.
If we now pass this residual signal to the synthesizer and use it to excite the
LPC filter, that is E(z) - R(z),
instead of using the noise or periodic waveform sources we get
Y(z) = E(z)H(z) = R(z)H(z) = X(z)H~\z)H(z) = X(z) (7.23)
In the
ideal case, we would hence get the original speech signal back. When minimizing
the variance of the residual signal (equation (7.20)), we gathered as much
information about the spccch signal as possible using this model in the filter
coefficients ak . The residual signal contains the
remaining information. If the model is well suited for the signal type (speech
signal), the residual signal is close to white noise, having a flat spectrum.
In such a case we can get away with coding only a small range of frequencies,
for instance 0-1 kHz of the residual signal. At the synthesizer, this baseband
is then repeated to generate higher frequencies. This signal is used to excite
the LPC filter
Vocoders
using RELP are used with transmission rates of 9.6 kbits/s. The advantage of
RELP is a better speech quality compared to LPC for the same bit rate. However,
the implementation is more computationally demanding.
Another
possible extension of the original LPC approach is to use multipulse excited linear
predictive coding (MLPC). This extension is an attempt to make the synthesized spcech less ‘mechanical’,
by using a number of different pitches of the excitation pulses rather than
only the two (periodic and noise) used by standard LPC.
The MLPC
algorithm sequentially detects k
pitches in a speech signal. As soon as one pitch is found it is subtracted from
the signal and detection starts over again, looking for the next pitch. Pitch
information detection is a hard task and the complexity of the required
algorithms is often considerable. MLPC however offers a better spcech quality
than LPC for a given bit rate and is used in systems working with 4.S-9.6
kbits/s.
Yet
another extension of LPC is the code
excited linear prediction (CELP).
The main
feature of the CELP compared to LPC is the way in which the filter coefficients
are handled. Assume that we have a standard LPC system, with a filter of the
order p . If every coefficient ak requires N bits, we need to transmit N-p bits per frame for the filter
parameters only. This approach is all right if all combinations of filter coefficients arc equally probable. This is
however not the case. Some combinations of coefficients are very probable,
while others may never occur. In CELP, the coefficient combinations arc
represented by p dimensional vectors.
Using vector quantization techniques, the most probable vectors are determined.
Each of these vectors are assigned an index
and stored in a codebook. Both the
analyser and synthesizer of course have identical copies of the codebook,
typically containing 256-512 vectors. Hcncc, instead of transmitting N-p bits per frame for the filter
parameters only 8-9 bits arc needed.
This
method offers high-quality spcech at low-bit rates but requires consid-erable
computing power to be able to store and match the incoming spcech to the
‘standard’ sounds stored in the codebook. This is of course especially true if
the codebook is large. Speech quality degrades as the codebook size decreases.
Most CELP
systems do not perform well with respect to higher frequency components of the
spccch signal at low hit rates. This is countcractcd in
There is
also a variant of CELP called vector sum excited linear prediction (VSELP). The main difference between
CELP and VSELP is the way the codebook is organized. Further, since
VSELP uses fixed point arithmetic algorithms, it is possible to implement using cheaper DSP chips than Adaptive
Filters
The
signal degradation in some physical systems is time varying, unknown, or
possibly both. For example,consider a high-speed modem for transmitting and
receiving data over telephone channels. It employs a filter called a channel
equalizer to compensate for the channel distortion. Since the dial-up
communication channels have different and time-varying characteristics on each
connection, the equalizer must be an adaptive filter.
Related Topics