Chapter: Digital Signal Processing : Applications of DSP
Adaptive Filter
Adaptive Filter:
Adaptive
filters modify their characteristics to achieve certain objectives by
automatically updating their coefficients. Many adaptive filter structures and
adaptation algorithms have been developed for different applications. This
chapter presents the most widely used adaptive filters based on the FIR filter
with the least-mean -square (LMS) algorithm. These adaptive filters are
relatively simple to design and implement. They are well understood with regard
to stability, convergence speed, steady-state performance, and finite-precision
effects.
Introduction
to Adaptive Filtering
An
adaptive filter consists of two distinct parts - a digital filter to perform
the desired filtering, and an adaptive algorithm to adjust the coefficients (or
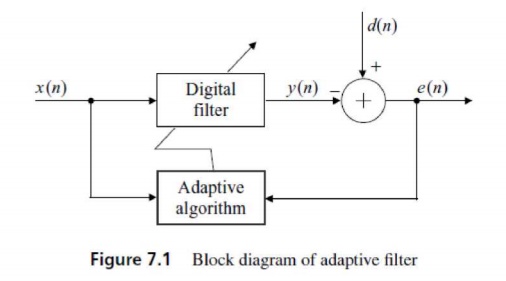
weights) of the filter. A general form of adaptive filter is illustrated in
Figure 7.1, where d(n) is a desired (or primary input) signal, y(n) is the
output of a digital filter driven by a reference input signal x(n), and an error signal e(n) is the
difference between d(n) and y(n). The adaptive algorithm adjusts the filter
coefficients to minimize the mean-square value of e(n). Therefore, the filter
weights are updated so that the error is progressively minimized on a
sample-bysample basis.
In
general, there are two types of digital filters that can be used for adaptive
filtering: FIR and IIR filters. The FIR filter is always stable and can provide
a linear-phase response. On the other hand, the IIR
filter
involves both zeros and poles. Unless they are properly controlled, the poles
in the filter may move outside the unit circle and result in an unstable system
during the adaptation of coefficients. Thus, the adaptive FIR filter is widely
used for practical real-time applications. This chapter focuses on the class of
adaptive FIR filters.
The most
widely used adaptive FIR filter is depicted in Figure 7.2. The filter output
signal is computed
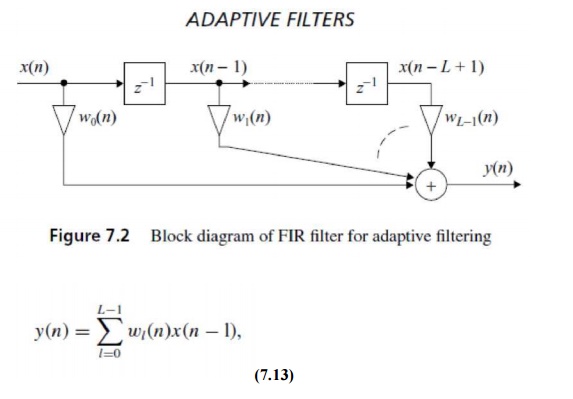
, where
the filter coefficients wl (n) are
time varying and updated by the adaptive algorithms that will be discussed
next.
We define
the input vector at time n as
x(n) =
[x(n)x(n - 1) . . . x(n - L + 1)]T ,
(7.14) and the weight vector at time n
as
w(n) =
[w0(n)w1(n) . . . wL-1(n)]T . (7.15) Equation (7.13) can be expressed in vector
form as y(n) = wT (n)x(n) = xT (n)w(n). (7.16)
The
filter outputy(n) is compared with the desired d(n) to obtain the error signal e(n)
= d(n) - y(n) = d(n) - wT (n)x(n). (7.17)
Our
objective is to determine the weight vector w(n) to minimize the predetermined performance (or cost) function.
Performance Function:
The adaptive filter shown in Figure 7.1 updates the coefficients of the digital filter to optimize some predetermined performance criterion. The most commonly used performance function is based on the mean-square error (MSE).
Related Topics