Chapter: Electrical machines : DC Motor
Starting of DC Motors
Starting
of DC Motors
The speed
of the machine has to be increased from zero and brought to the operating
speed. This is called starting of the motor. The operating speed itself should
be varied as per the requirements of the load. This is called speed control.
Finally, the running machine has to be brought to rest, by decelerating the
same. This is called braking.
At the
instant of starting, rotor speed n = 0, hence starting armature current is
Ist=V/ra. Since, armature resistance is quite small, starting current may be
quite high (many times larger than the rated current). A large machine,
characterized by large rotor inertia (J), will pick up speed rather slowly.
Thus the level of high starting current may be maintained for quite some time
so as to cause serious damage to the brush/commutator and to the armature
winding. Also the source should be capable of supplying this burst of large
current. The other loads already connected to the same source, would experience
a dip in the terminal voltage, every time a D.C motor is attempted to start
with full voltage. This dip in supply voltage is caused due to sudden rise in
voltage drop in the source's internal resistance. The duration for which this
drop in voltage will persist once again depends on inertia of the motor. Hence,
for small D.C motors extra precaution may not be necessary during starting as
large starting current will very quickly die down because of fast rise in the
back emf. However, for large motor, a starter is to be used during starting.
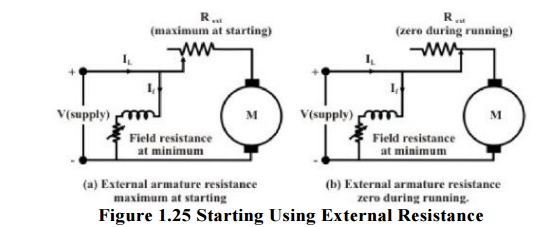
A simple
starter to limit the starting current, a suitable external resistance R is
connected in series, as shown in the figure, with the armature so that
Ist=V/(R+ra) At the time of starting, to have sufficient starting torque, field
current is maximized by keeping external field resistance Rf to zero value. As
the motor picks up speed, the value of R is gradually decreased to zero so that
during running no external resistance remains in the armature circuit. But each
time one has to restart the motor, the external armature resistance must be set
to maximum value by moving the jockey manually. Now if the supply goes off,
motor will come to a stop. All on a sudden, let us imagine, supply is restored.
This is then nothing but full voltage starting. In other words, one should be
constantly alert to set the resistance to maximum value whenever the motor
comes to a stop. This is one major limitation of a simple rheostatic starter.
Related Topics