Chapter: Principles of Compiler Design : Code optimization
Principal Sources of Optimisation
PRINCIPAL SOURCES OF OPTIMISATION
A transformation of a
program is called local if it can be performed by looking only at the
statements in a basic block; otherwise, it is called global. Many
transformations can be performed at both the local and global levels. Local
transformations are usually performed first.
Function-Preserving Transformations
There are a number of
ways in which a compiler can improve a program without changing the function it
computes.
Function preserving transformations examples:
Common sub expression elimination
Copy propagation,
Dead-code elimination
Constant folding
The other transformations come up primarily when
global optimizations are performed.
Frequently, a program
will include several calculations of the offset in an array. Some of the
duplicate calculations cannot be avoided by the programmer because they lie
below the level of detail accessible within the source language.
***
Common Sub expressions elimination:
•
An occurrence of an expression E is
called a common sub-expression if E was previously computed, and the values of
variables in E have not changed since the previous computation. We can avoid
recomputing the expression if we can use the previously computed value.
•
For example
t1: = 4*i
t2: = a [t1]
t3: = 4*j
t4: = 4*i
t5: = n
t6:
= b [t4] +t5
The above code can be optimized using the common
sub-expression elimination as
t1: = 4*i
t2: = a [t1]
t3: = 4*j
t5: = n
t6:
= b [t1] +t5
The common sub
expression t4: =4*i is eliminated as its computation is already in t1 and the
value of i is not been changed from definition to use.
Copy Propagation:
Assignments of the form
f : = g called copy statements, or copies for short. The idea behind the
copy-propagation transformation is to use g for f, whenever possible after the
copy statement f: = g. Copy propagation means use of one variable instead of
another. This may not appear to be an improvement, but as we shall see it gives
us an opportunity to eliminate x.
• For example:
x=Pi;
A=x*r*r;
The optimization using copy propagation can be done
as follows: A=Pi*r*r;
Here the variable x is eliminated
Dead-Code Eliminations:
A variable is live at a
point in a program if its value can be used subsequently; otherwise, it is dead
at that point. A related idea is dead or useless code, statements that compute
values that never get used. While the programmer is unlikely to introduce any
dead code intentionally, it may appear as the result of previous transformations.
Example:
i=0;
if(i=1)
{
a=b+5;
}
Here, ‘if’ statement is dead code because this
condition will never get satisfied.
Constant folding:
Deducing at compile
time that the value of an expression is a constant and using the constant
instead is known as constant folding. One advantage of copy propagation is that
it often turns the copy statement into dead code.
For example,
a=3.14157/2
can be replaced by
a=1.570
there by eliminating a division operation.
Loop Optimizations:
In loops, especially in
the inner loops, programs tend to spend the bulk of their time. The running
time of a program may be improved if the number of instructions in an inner
loop is decreased, even if we increase the amount of code outside that loop.
Three
techniques are important for loop optimization:
Ø
Code motion, which moves code outside a
loop;
Ø
Induction-variable elimination, which we
apply to replace variables from inner loop.
Ø
Reduction in strength, which replaces
and expensive operation by a cheaper one, such as a multiplication by an
addition.
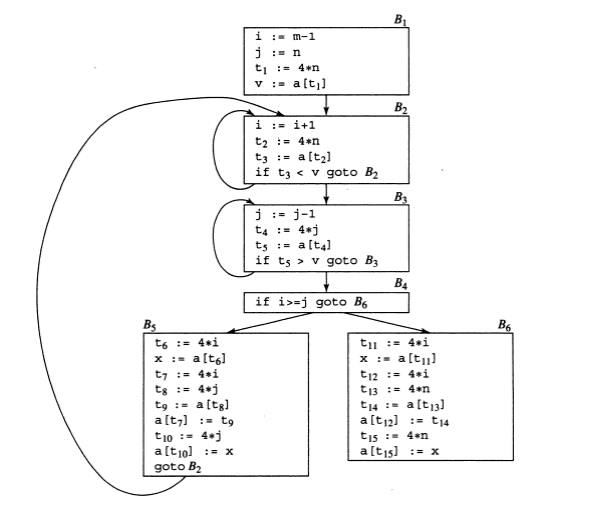
Fig.
5.2 Flow graph
Code Motion:
An important
modification that decreases the amount of code in a loop is code motion. This
transformation takes an expression that yields the same result independent of
the number of times a loop is executed (a loop-invariant computation) and
places the expression before the loop. Note that the notion “before the loop”
assumes the existence of an entry for the loop. For example, evaluation of
limit-2 is a loop-invariant computation in the following while-statement:
while
(i <= limit-2) /* statement does not change limit*/
Code motion will result in the equivalent of
t=
limit-2;
while
(i<=t) /* statement does not change limit or t */
Induction Variables :
Loops are usually processed
inside out. For example consider the loop around B3. Note that the values of j
and t4 remain in lock-step; every time the value of j decreases by 1, that of
t4 decreases by 4 because 4*j is assigned to t4. Such identifiers are called
induction variables.
When there are two or
more induction variables in a loop, it may be possible to get rid of all but
one, by the process of induction-variable elimination. For the inner loop
around B3 in Fig.5.3 we cannot get rid of either j or t4 completely; t4 is used
in B3 and j in B4.
However, we can
illustrate reduction in strength and illustrate a part of the process of
induction-variable elimination. Eventually j will be eliminated when the outer
loop of B2- B5 is considered.
Example:
As the relationship t4:=4*j
surely holds after such an assignment to t4 in Fig. and t4 is not changed
elsewhere in the inner loop around B3, it follows that just after the statement
j:=j-1 the relationship t4:= 4*j-4 must hold. We may therefore replace the
assignment t4:= 4*j by t4:= t4-4. The only problem is that t4 does not have a
value when we enter block B3 for the first time. Since we must maintain the
relationship t4=4*j on entry to the block B3, we place an initializations of t4
at the end of the block where j itself is initialized, shown by the dashed
addition to block B1 in Fig.5.3.
The replacement of a
multiplication by a subtraction will speed up the object code if multiplication
takes more time than addition or subtraction, as is the case on many machines.
Reduction In Strength:
Reduction in strength
replaces expensive operations by equivalent cheaper ones on the target machine.
Certain machine instructions are considerably cheaper than others and can often
be used as special cases of more expensive operators. For example, x² is
invariably cheaper to implement as x*x than as a call to an exponentiation
routine. Fixed-point multiplication or division by a power of two is cheaper to
implement as a shift. Floating-point division by a constant can be implemented
as multiplication by a constant, which may be cheaper.
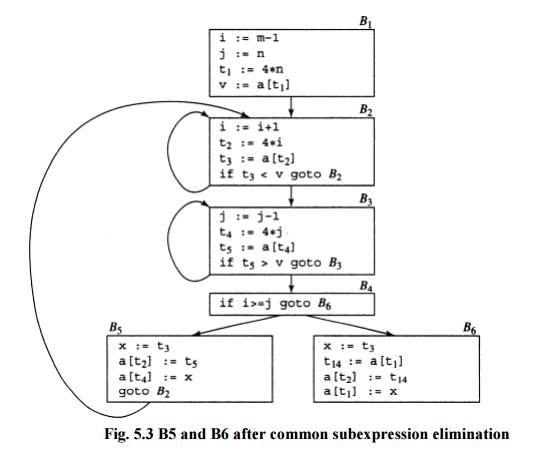
Fig.
5.3 B5 and B6 after common subexpression elimination
Related Topics