Chapter: The Diversity of Fishes: Biology, Evolution, and Ecology: Functional morphology of locomotion and feeding
Locomotion: movement and shape - Fishes
Locomotion: movement and shape
Body shape and locomotory behavior in fishes are determined by the extreme density of water. Locomotory adaptations in terrestrial and flying animals strongly reflect need to overcome gravity. Body and appendage shape in fishes in contrast reflects little influence of gravity because gas bladders or lipid-containing structures make most fishes neutrally buoyant (see Buoyancy regulation).Fish locomotion is more constrained by the density of water and the drag exerted by it (Videler 1993).
Water is about 800 times more dense and 50 times more viscous than air. Locomotion through this dense, viscousmedium is energetically expensive, a problem exacerbated by the 95% reduction in oxygen-carrying capacity of wateras compared to air (see Water as a respiratory environment). The chief cause of added energetic cost isdrag, which has two components, viscous or frictional draginvolving friction between the fish’s body and the surrounding water, and inertial or pressure drag caused by pressure differences that result from displacement of water as the fish moves through it. Viscous drag is not affected greatly by speed but more by the smoothness of a surface and by the amount of surface area, which is linked to body and fin shape; production of mucus reduces viscous drag. Inertial drag increases with speed and is therefore also intimately linked to body shape. Most fast-swimming fishes have a classic streamlined shape that minimizes both inertial and viscous drag. A streamlined body is round in cross-section and has a maximum width equal to 25% of its length. The width : length ratio is 0.26 in some pelagic sharks, 0.24 in swordfish, and 0.28 in tunas. The thickest portion of astreamlined body occurs about two-fifths of the way back from the anterior end, another rule followed by large pelagic predators. Interestingly, these same streamlined fishes are also slightly negatively buoyant and hence sink if they cease swimming. They often have wing likepectoral fins that are extended laterally at a positive attack angle, thus generating lift (except sharks, see below). They minimize drag by retracting paired and median fins into depressions or even grooves in the body surface; a sailfish housesits greatly expanded dorsal fin “sail” in a groove on its dorsal surface during fast swimming (Hertel 1966; Hildebrand1982; Pough et al. 2001).
Most fishes swim by contracting a series of muscles on one side of the body and relaxing muscles on the other.
The muscle blocks, called myomeres, attach to collagenoussepta which in turn attach to the backbone and skin(Fig. 8.1). Depending on the swimming form involved (see below), contractions may progress from the head to the tailor occur on one side and then the other. The result of the contractions is that the fish’s body segments push back on the water. Given Newton’s Third Law of Motion concerning equal and opposite forces, this pushing back produces an opposite reactive force which thrusts the fish forward. Forward thrust results from combined forces pushing forward and laterally; the lateral component is cancelled bya rigid head and by median fins and in some cases by a deep body that resists lateral displacement.
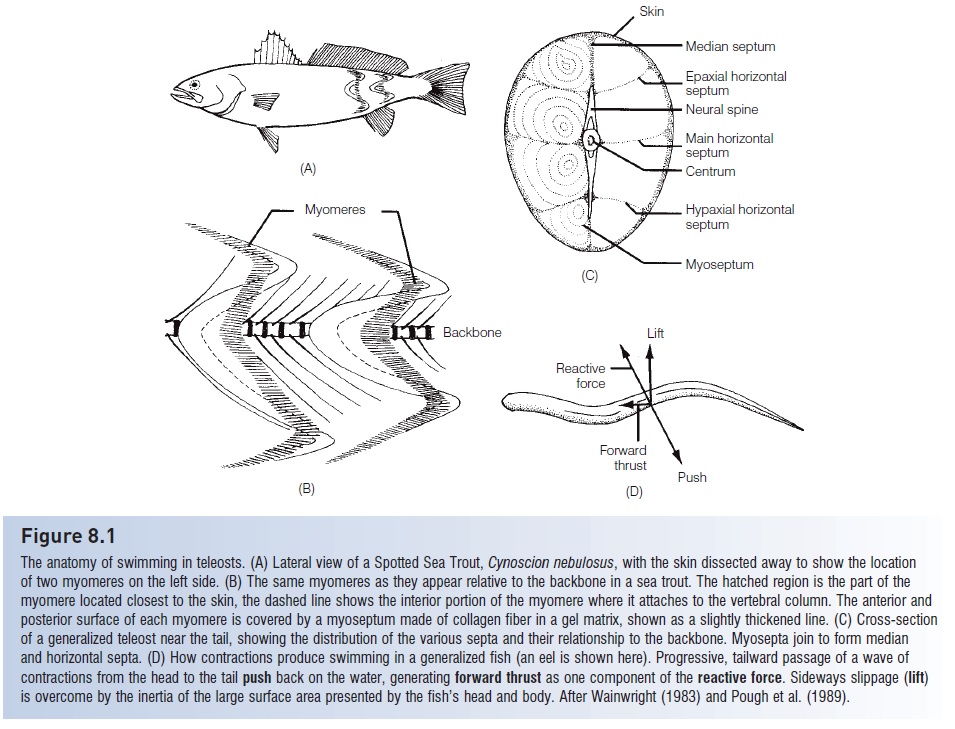
Figure 8.1
The anatomy of swimming in teleost’s. (A) Lateral view of a Spotted Sea Trout, Cynoscion nebulosus, with the skin dissected away to show the location of two myomeres on the left side. (B) The same myomeres as they appear relative to the backbone in a sea trout. The hatched region is the part of themyomere located closest to the skin, the dashed line shows the interior portion of the myomere where it attaches to the vertebral column. The anterior and posterior surface of each myomere is covered by a my septum made of collagen fiber in a gel matrix, shown as a slightly thickened line. (C) Cross-section of a generalized teleost near the tail, showing the distribution of the various septa and their relationship to the backbone. Myosepta join to form median and horizontal septa. (D) How contractions produce swimming in a generalized fish (an eel is shown here). Progressive, tail ward passage of a wave of contractions from the head to the tail push back on the water, generating forward thrust as one component of the reactive force. Sideways slippage (lift)is overcome by the inertia of the large surface area presented by the fish’s head and body. After Wainwright (1983) and Pough et al. (1989).
Related Topics