Chapter: Basic Electrical : Electrical Machines
Induction motors
Induction motors
Definition:
An
induction motor (or asynchronous motor) is a type of alternating current motor
where power is supplied to the rotor by means of electromagnetic induction.
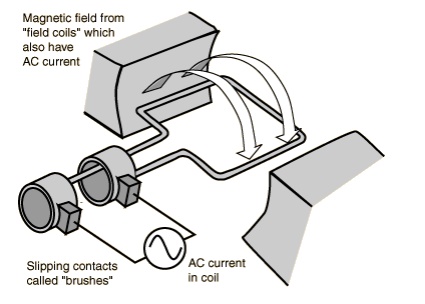
An AC motor is an electric motor that is driven by
an alternating current. It consists of two basic parts, an outside stationary
stator having coils supplied with alternating current to produce a rotating
magnetic field, and an inside rotor attached to the output shaft that is given
a torque by the rotating field.
There are
two types of AC motors, depending on the type of rotor used. The first is the
synchronous motor, which rotates exactly at the supply frequency or a
submultiple of the supply frequency. The magnetic field on the rotor is either
generated by current delivered through slip rings or by a permanent magnet.
The
second type is the induction motor, which turns slightly slower than the supply
frequency. The magnetic field on the rotor of this motor is created by an
induced current.
Induction
ac motors are the simplest and most rugged electric motor and consists of two
basic electrical assemblies: the wound stator and the rotor assembly. The
induction ac motor derives its name from currents flowing in the secondary
member (rotor) that are induced by alternating currents flowing in the primary
member (stator). The combined electromagnetic effects of the stator and rotor
currents produce the force to create rotation.
AC motors
typically feature rotors, which consist of a laminated, cylindrical iron core
with slots for receiving the conductors. The most common type of rotor has
cast-aluminum conductors and short-circuiting end rings. This ac motor
"squirrel cage" rotates when the moving magnetic field induces a
current in the shorted conductors. The speed at which the ac motor magnetic
field rotates is the synchronous speed of the ac motor and is determined by the
number of poles in the stator and the frequency of the power supply: ns =
120f/p, where ns = synchronous speed, f = frequency, and p = the number of
poles.
Synchronous
speed is the absolute upper limit of ac motor speed. If the ac motor's rotor
turns exactly as fast as the rotating magnetic field, then no lines of force
are cut by the rotor conductors, and torque is zero. When ac motors are
running, the rotor always rotates slower than the magnetic field. The ac
motor's rotor speed is just slow enough to cause the proper amount of rotor
current to flow, so that the resulting torque is sufficient to overcome windage
and friction losses, and drive the load. The speed difference between the ac
motor's rotor and magnetic field, called slip, is normally referred to as a
percentage of synchronous speed: s = 100 (ns - na)/ns, where s = slip, ns =
synchronous speed, and na = actual speed.
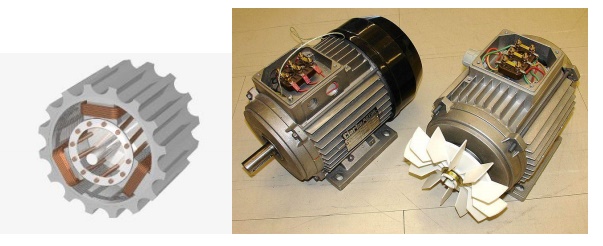
Construction of 1 phase induction
motor:
The induction motor essentially consists of two parts:
Stator
Rotor.
The supply is connected to the stator and the rotor received power by induction caused by the stator rotating flux, hence the motor obtains its name -induction motor. The stator consists of a cylindrical laminated & slotted core placed in a frame of rolled or cast steel. The frame provides mechanical protection and carries the terminal box and the end covers with bearings. In the slots of a 3-phase winding of insulated copper wire is distributed which can be wound for 2,4,6 etc. poles.
The rotor consists of a laminated and slotted core tightly pressed on the shaft. There are two general types of rotors:
The squirrel-cage rotor,
The wound (or slip ring) rotor.
In the squirrel-cage rotor, the rotor winding consists of single copper or aluminium bars placed in the slots and short-circuited by end-rings on both sides of the rotor.
In the
wound rotor, an insulated 3-phasewinding similar to the stator winding and for
the same number of poles is placed in the rotor slots. The ends of the
star-connected rotor winding are brought to three slip rings on the shaft so
theta connection can be made to it for starting or speed control.
Application ofinduction motor:
Speed variation.
Heavy
load inertia starting.
High
starting torque requirements.
Low
starting current requirements.
High
efficiency at low speed.
High
power factor.
Related Topics