Chapter: Introduction to the Design and Analysis of Algorithms : Transform and Conquer
Heaps and Heapsort
Heaps and
Heapsort
The data structure called the ŌĆ£heapŌĆØ is
definitely not a disordered pile of items as the wordŌĆÖs definition in a
standard dictionary might suggest. Rather, it is a clever, partially ordered
data structure that is especially suitable for implementing priority queues.
Recall that a priority queue is a multiset of items with an orderable
characteristic called an itemŌĆÖs priority, with the following
operations:
finding an item with the highest (i.e.,
largest) priority deleting an item with the highest priority
adding a new item to the multiset
It is primarily an efficient implementation of
these operations that makes the heap both interesting and useful. Priority
queues arise naturally in such ap-plications as scheduling job executions by
computer operating systems and traf-fic management by communication networks.
They also arise in several impor-tant algorithms, e.g., PrimŌĆÖs algorithm
(Section 9.1), DijkstraŌĆÖs algorithm (Sec-tion 9.3), Huffman encoding (Section
9.4), and branch-and-bound applications (Section 12.2). The heap is also the
data structure that serves as a cornerstone of a theoretically important
sorting algorithm called heapsort. We discuss this algo-rithm after we define
the heap and investigate its basic properties.
Notion of the Heap
DEFINITION A heap can be defined as a binary tree with keys assigned to its nodes, one key per node, provided the following
two conditions are met:
The shape
propertyŌĆöthe binary tree is essentially complete (or simply com-plete),
i.e., all its levels are full except possibly the last level, where only some rightmost
leaves may be missing.
The parental
dominance or heap propertyŌĆöthe key in each node
is greater than or equal to the keys in its children. (This condition is
considered auto-matically satisfied for all leaves.)5
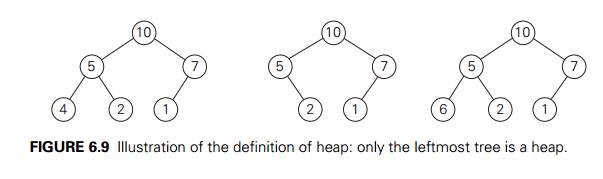
For example, consider the trees of Figure 6.9.
The first tree is a heap. The second one is not a heap, because the treeŌĆÖs
shape property is violated. And the third one is not a heap, because the
parental dominance fails for the node with key 5.
Note that key values in a heap are ordered top
down; i.e., a sequence of values on any path from the root to a leaf is
decreasing (nonincreasing, if equal keys are allowed). However, there is no
left-to-right order in key values; i.e., there is no
relationship among key values for nodes either
on the same level of the tree or, more generally, in the left and right
subtrees of the same node.
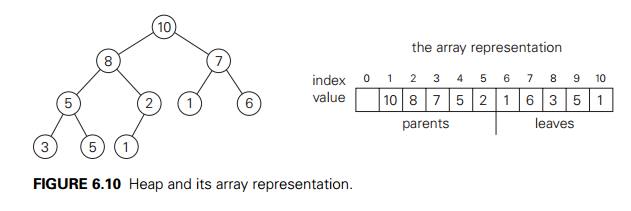
Here is a list of important properties of
heaps, which are not difficult to prove (check these properties for the heap of
Figure 6.10, as an example).
There
exists exactly one essentially complete binary tree with n nodes. Its height is equal to log2 n .
The root
of a heap always contains its largest element.
A node of
a heap considered with all its descendants is also a heap.
A heap
can be implemented as an array by recording its elements in the top-down,
left-to-right fashion. It is convenient to store the heapŌĆÖs elements in
positions 1 through n of such an array, leaving H [0] either unused or putting there a sentinel
whose value is greater than every element in the heap. In such a
representation,
the
parental node keys will be in the first n/2 positions of the array, while the leaf keys
will occupy the last n/2 positions;
the
children of a key in the arrayŌĆÖs parental position i (1 Ōēż i Ōēż n/2 ) will be in positions 2i and 2i + 1, and, correspondingly, the parent of a key
in position i (2 Ōēż i Ōēż n) will be in position i/2 .
Thus, we could also define a heap as an array H [1..n] in which every element in position i in the first half of the array is greater than or equal to the
elements in positions 2i and 2i + 1, i.e.,
H [i] Ōēź max{H [2i], H [2i + 1]} for i = 1, . . . , n/2 .
(Of course, if 2i + 1 > n, just H [i] Ōēź H [2i] needs to be satisfied.) While the ideas
behind the majority of algorithms dealing with heaps are easier to understand
if we think of heaps as binary trees, their actual implementations are usually
much simpler and more efficient with arrays.
How can we construct a heap for a given list of
keys? There are two principal alternatives for doing this. The first is the bottom-up
heap construction algorithm illustrated in Figure 6.11. It initializes
the essentially complete binary tree with n nodes by placing keys in the order given and
then ŌĆ£heapifiesŌĆØ the tree as follows. Starting with the last parental node, the
algorithm checks whether the parental
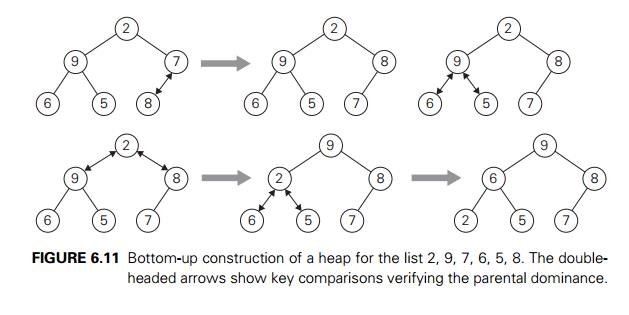
dominance holds for the key in this node. If it
does not, the algorithm exchanges the nodeŌĆÖs key K with the larger key of its children and checks
whether the parental dominance holds for K in its new position. This process continues
until the parental dominance for K is satisfied. (Eventually, it has to because
it holds automatically for any key in a leaf.) After completing the
ŌĆ£heapificationŌĆØ of the subtree rooted at the current parental node, the
algorithm proceeds to do the same for the nodeŌĆÖs immediate predecessor. The
algorithm stops after this is done for the root of the tree.
ALGORITHM HeapBottomUp(H [1..n])
//Constructs a heap from elements of a given
array // by the bottom-up algorithm
//Input: An array H [1..n] of orderable items //Output: A heap H [1..n]
for i ŌåÉ n/2 downto 1 do k ŌåÉ i; v ŌåÉ H [k] heap ŌåÉ false
while
not heap and 2 ŌłŚ k Ōēż n do
j ŌåÉ 2 ŌłŚ k
if j < n //there are two children if H [j ] < H [j + 1] j ŌåÉ j + 1
if v Ōēź H [j ]
heap ŌåÉ true
else H [k] ŌåÉ H [j ]; k ŌåÉ j H [k] ŌåÉ v
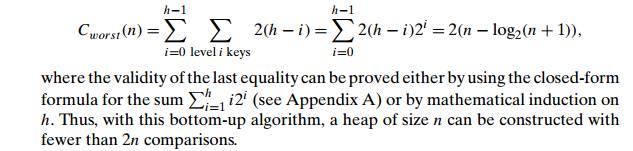
How efficient is this algorithm in the worst
case? Assume, for simplicity, that n = 2k ŌłÆ 1 so that a heapŌĆÖs tree is full, i.e., the
largest possible number of nodes occurs on each level. Let h be the height of the tree. According to the first property of heaps
in the list at the beginning of the section, h = log2 n or just log2 (n + 1) ŌłÆ 1 = k ŌłÆ 1 for the specific values of n we are considering. Each key on level i of the tree will travel to the leaf level h in the worst case of the heap construction algorithm. Since moving
to the next level down requires two comparisonsŌĆöone to find the larger child
and the other to determine whether the exchange is requiredŌĆöthe total number of
key comparisons involving a key on level i will be 2(h ŌłÆ i). Therefore, the total number of key comparisons
in the worst case will be
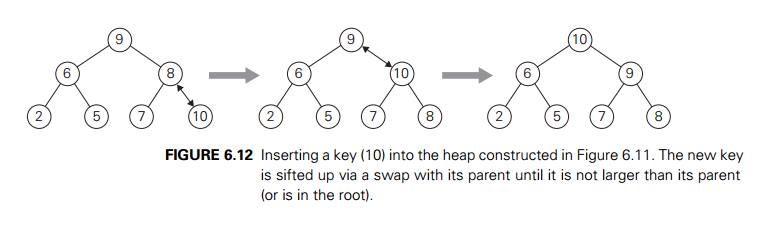
The alternative (and less efficient) algorithm
constructs a heap by successive insertions of a new key into a previously
constructed heap; some people call it the top-down heap construction
algorithm. So how can we insert a new key K into a heap? First, attach a new node with key
K in it after the last leaf of the existing heap. Then sift K up to its appropriate place in the new heap as follows. Compare K with its parentŌĆÖs key: if the latter is greater than or equal to K, stop (the structure is a heap); otherwise, swap these two keys and
compare K with its new parent. This swapping continues until K is not greater than its last parent or it reaches the root
(illustrated in Figure 6.12).
Obviously, this insertion operation cannot
require more key comparisons than the heapŌĆÖs height. Since the height of a heap
with n nodes is about log2 n, the time efficiency of insertion is in O(log n).
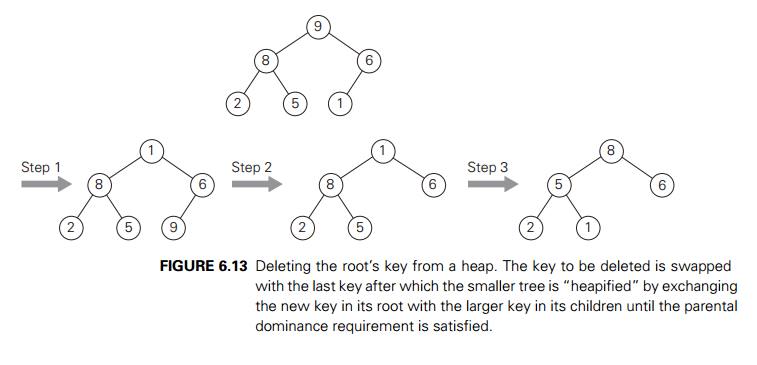
How can we delete an item from a heap? We
consider here only the most important case of deleting the rootŌĆÖs key, leaving
the question about deleting an arbitrary key in a heap for the exercises.
(Authors of textbooks like to do such things to their readers, do they not?) Deleting
the rootŌĆÖs key from a heap can be done with the following algorithm,
illustrated in Figure 6.13.
Maximum
Key Deletion from a
heap
Step 1 Exchange the rootŌĆÖs key with the last key K of the heap. Step 2 Decrease the heapŌĆÖs size by 1.
Step 3 ŌĆ£HeapifyŌĆØ the smaller tree by sifting K down the tree exactly in the same way we did it in the bottom-up
heap construction algorithm. That is, verify the parental dominance for K: if it holds, we are done; if not, swap K with the larger of its children and repeat this operation until
the parental dominance condition holds for K in its new position.
The efficiency of deletion is determined by the
number of key comparisons needed to ŌĆ£heapifyŌĆØ the tree after the swap has been
made and the size of the tree is decreased by 1. Since this cannot require more
key comparisons than twice the heapŌĆÖs height, the time efficiency of deletion
is in O(log n) as well.
Now we can describe heapsortŌĆöan interesting
sorting algorithm discovered by J. W. J. Williams [Wil64]. This is a two-stage
algorithm that works as follows.
Stage 1 (heap construction): Construct a heap for a
given array.
Stage 2 (maximum deletions): Apply the root-deletion
operation n ŌłÆ 1 times to
the remaining heap.
As a result, the array elements are eliminated
in decreasing order. But since under the array implementation of heaps an
element being deleted is placed last, the resulting array will be exactly the
original array sorted in increasing order. Heapsort is traced on a specific
input in Figure 6.14. (The same input as the one
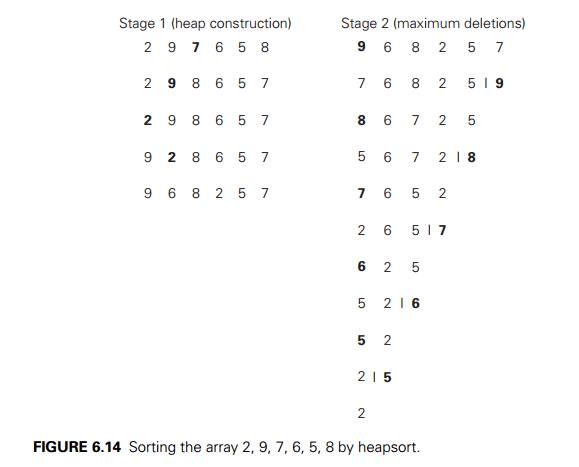
in Figure 6.11 is intentionally used so that
you can compare the tree and array implementations of the bottom-up heap
construction algorithm.)
Since we already know that the heap
construction stage of the algorithm is in O(n), we have to investigate just the time
efficiency of the second stage. For the number of key comparisons, C(n), needed for eliminating the root keys from the heaps of diminishing
sizes from n to 2, we get the following inequality:
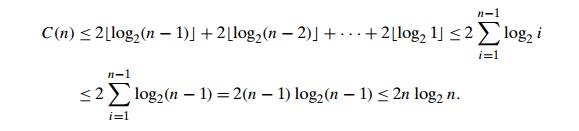
This means that C(n) Ōłł O(n log n) for the second stage of heapsort. For both
stages, we get O(n) + O(n log n) = O(n log n). A more detailed analysis shows that the time
efficiency of heapsort is, in fact, in (n log n) in both the worst and average cases. Thus,
heapsortŌĆÖs time efficiency falls in the same class as that of mergesort. Unlike
the latter, heapsort is in-place, i.e., it does not require any extra storage.
Timing experiments on random files show that heapsort runs more slowly than
quicksort but can be competitive with mergesort.
Exercises 6.4
a. Construct a heap for the list 1, 8, 6, 5, 3, 7,
4 by the bottom-up algorithm.
Construct
a heap for the list 1, 8, 6, 5, 3, 7, 4 by successive key insertions (top-down
algorithm).
Is it
always true that the bottom-up and top-down algorithms yield the same heap for
the same input?
Outline
an algorithm for checking whether an array H [1..n] is a heap and determine its time efficiency.
a. Find the smallest and the largest number of keys that a heap of
height h can contain.
Prove
that the height of a heap with n nodes is equal to log2 n .
Prove
the following equality used in Section 6.4:

a. Design an efficient algorithm for finding and deleting an element
of the smallest value in a heap and
determine its time efficiency.
Design
an efficient algorithm for finding and deleting an element of a given value v in a heap H and determine its time efficiency.
Indicate
the time efficiency classes of the three main operations of the priority queue
implemented as
an
unsorted array.
a sorted
array.
a binary
search tree.
an AVL
tree.
a heap.
Sort the
following lists by heapsort by using the array representation of heaps.
1, 2, 3,
4, 5 (in increasing order)
5, 4, 3,
2, 1 (in increasing order)
S, O, R,
T, I, N, G (in alphabetical order)
Is
heapsort a stable sorting algorithm?
What
variety of the transform-and-conquer technique does heapsort repre-sent?
Which
sorting algorithm other than heapsort uses a priority queue?
Implement three advanced sorting
algorithmsŌĆömergesort, quicksort, and heapsortŌĆöin the language of your choice
and investigate their performance on arrays of sizes n = 103, 104, 105, and 106. For each of these sizes consider
randomly
generated files of integers in the range [1..n].
increasing
files of integers 1, 2, . . . , n.
decreasing
files of integers n, n ŌłÆ 1, . . . , 1.
Spaghetti sort Imagine a handful of uncooked spaghetti,
individual rods whose lengths
represent numbers that need to be sorted.
Outline
a ŌĆ£spaghetti sortŌĆØŌĆöa sorting algorithm that takes advantage of this unorthodox
representation.
What does
this example of computer science folklore (see [Dew93]) have to do with the
topic of this chapter in general and heapsort in particular?
Related Topics