Chapter: Introduction to the Design and Analysis of Algorithms : Transform and Conquer
Gaussian Elimination
You are certainly familiar with systems of two
linear equations in two unknowns:
a11x + a12y = b1
a21x + a22y = b2.
Recall that unless the coefficients of one
equation are proportional to the coef-ficients of the other, the system has a
unique solution. The standard method for finding this solution is to use either
equation to express one of the variables as a function of the other and then
substitute the result into the other equation, yield-ing a linear equation
whose solution is then used to find the value of the second variable.
In many applications, we need to solve a system
of n equations in n unknowns:
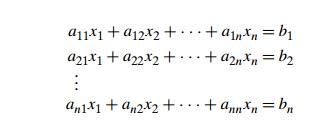
where n is a large number. Theoretically, we can solve
such a system by general-izing the substitution method for solving systems of
two linear equations (what general design technique would such a method be
based upon?); however, the resulting algorithm would be extremely cumbersome.
Fortunately, there is a much more elegant
algorithm for solving systems of linear equations called Gaussian elimination.2
The idea of Gaussian elimination is to transform a system of n linear equations in n unknowns to an equivalent system (i.e., a
system with the same solution as the original one) with an upper-triangular
coefficient matrix, a matrix with all zeros below its main diagonal:
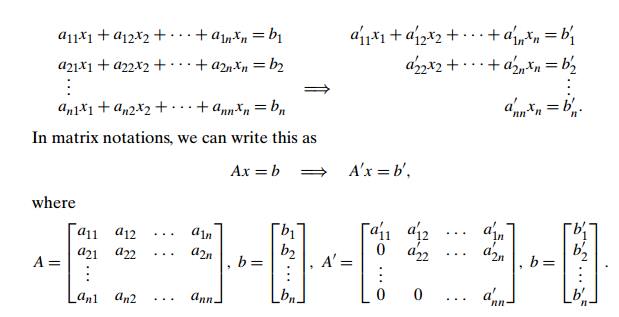
(We added primes to the matrix elements and
right-hand sides of the new system to stress the point that their values differ
from their counterparts in the original system.)
Why is the system with the upper-triangular
coefficient matrix better than a system with an arbitrary coefficient matrix?
Because we can easily solve the system with an upper-triangular coefficient
matrix by back substitutions as follows. First, we can immediately find the
value of xn from the last equation; then we can substitute
this value into the next to last equation to get xnŌłÆ1, and so on, until we substitute the known
values of the last n ŌłÆ 1 variables into the first equation, from
which we find the value of x1.
So how can we get from a system with an
arbitrary coefficient matrix A to an equivalent system with an
upper-triangular coefficient matrix A ? We can do that through a series of the
so-called elementary operations:
exchanging two equations of the system
replacing an equation with its nonzero multiple replacing an equation with a
sum or difference of this equation and some multiple of another equation
Since no elementary operation can change a
solution to a system, any system that is obtained through a series of such
operations will have the same solution as the original one.
Let us see how we can get to a system with an
upper-triangular matrix. First, we use a11 as a pivot to make all x1 coefficients zeros in the equations below the first one.
Specifically, we replace the second equation with the difference between it and
the first equation multiplied by a21/a11 to get an equation with a zero coefficient for x1. Doing the same for the third, fourth, and
finally nth equationŌĆöwith the multiples a31/a11, a41/a11, . . .
, an1/a11 of the
first equation, respectivelyŌĆömakes all the coefficients of x1 below
the first equation zero. Then we get rid of all the coefficients of x2 by
subtracting an appropriate multiple of the second equation from each of the
equations below the second one. Repeating this elimination for each of the
first n ŌłÆ 1 variables ultimately yields a system with an upper-triangular
coefficient matrix.
Before we look at an example of Gaussian
elimination, let us note that we can operate with just a systemŌĆÖs coefficient
matrix augmented, as its (n + 1)st column, with the equationsŌĆÖ right-hand side
values. In other words, we need to write explicitly neither the variable names
nor the plus and equality signs.
EXAMPLE 1 Solve
the system by Gaussian elimination.
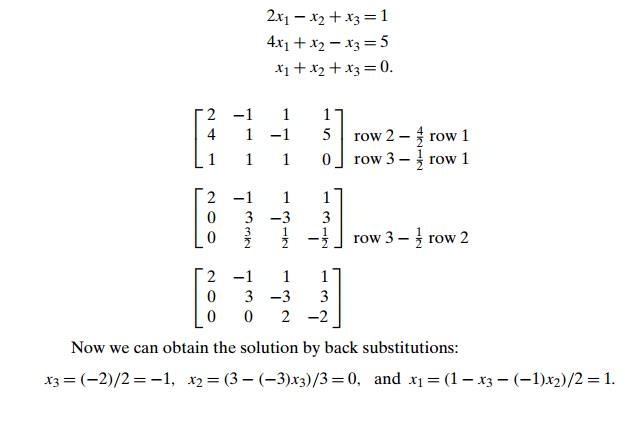
Here is pseudocode of the first stage, called forward
elimination, of the algorithm.
ALGORITHM ForwardElimination(A[1..n, 1..n], b[1..n])
//Applies Gaussian elimination to matrix A of a systemŌĆÖs coefficients, //augmented with vector b of the systemŌĆÖs right-hand side values //Input: Matrix A[1..n, 1..n] and column-vector b[1..n]
//Output: An equivalent upper-triangular matrix
in place of A with the //corresponding right-hand side values in the (n + 1)st column
for i ŌåÉ 1 to n do A[i, n + 1] ŌåÉ b[i] //augments the matrix for i ŌåÉ 1 to n ŌłÆ 1 do
for j ŌåÉ i + 1 to n do
for k ŌåÉ i to n + 1 do
A[j, k] ŌåÉ A[j, k] ŌłÆ A[i, k] ŌłŚ A[j, i] / A[i, i]
There are two important observations to make
about this pseudocode. First, it is not always correct: if A[i, i] = 0, we cannot divide by it and hence cannot use
the ith row as a pivot for the ith iteration of the algorithm. In such a case,
we should take advantage of the first elementary operation and exchange the ith row with some row below it that has a nonzero coefficient in the
ith column. (If the system has a unique solution, which is the
normal case for systems under consideration, such a row must exist.)
Since we have to be prepared for the
possibility of row exchanges anyway, we can take care of another potential
difficulty: the possibility that A[i, i] is so small and consequently the scaling
factor A[j, i]/A[i, i] so large that the new value of A[j, k] might become distorted by a round-off error
caused by a subtraction of two numbers of greatly different magnitudes.3
To avoid this problem, we can always look for a row with the largest absolute
value of the coefficient in the ith column, exchange it with the ith row, and then use the new A[i, i] as the ith iterationŌĆÖs pivot. This modification, called
partial
pivoting, guarantees that the magnitude of the scaling factor will
never exceed 1.
The second observation is the fact that the
innermost loop is written with a glaring inefficiency. Can you find it before
checking the following pseudocode, which both incorporates partial pivoting and
eliminates this inefficiency?
ALGORITHM BetterForwardElimination(A[1..n, 1..n], b[1..n])
//Implements Gaussian elimination with partial
pivoting //Input: Matrix A[1..n, 1..n] and column-vector b[1..n]
//Output: An equivalent upper-triangular matrix
in place of A and the //corresponding right-hand side values in place of the (n + 1)st column for
i ŌåÉ 1 to n do A[i, n + 1] ŌåÉ b[i] //appends
b to A as the last column for i ŌåÉ 1 to n ŌłÆ 1 do
pivot row ŌåÉ i
for j ŌåÉ i + 1 to n do
if |A[j, i]| > |A[pivot row, i]| pivot row ŌåÉ j for k ŌåÉ i to n + 1 do
swap(A[i, k], A[pivot row, k]) for j ŌåÉ i + 1 to n do
t emp ŌåÉ A[j, i] / A[i, i] for k ŌåÉ i to n + 1 do
A[j, k] ŌåÉ A[j, k] ŌłÆ A[i, k] ŌłŚ t emp
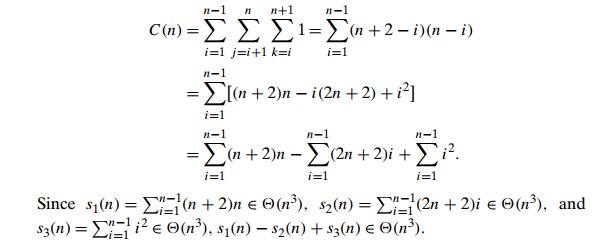
Let us find the time efficiency of this
algorithm. Its innermost loop consists of a single line,
A[j, k] ŌåÉ A[j, k] ŌłÆ A[i, k] ŌłŚ t emp,
which contains one multiplication and one
subtraction. On most computers, multi-plication is unquestionably more
expensive than addition/subtraction, and hence it is multiplication that is
usually quoted as the algorithmŌĆÖs basic operation.4 The standard
summation formulas and rules reviewed in Section 2.3 (see also Appen-dix A) are
very helpful in the following derivation:
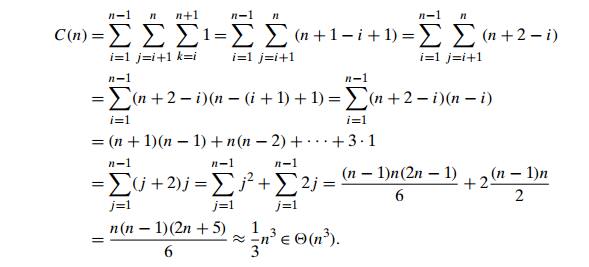
Since the second (back substitution) stage
of Gaussian elimination is in (n2), as you are asked to show in the exercises, the
running time is dominated by the cubic elimination stage, making the entire
algorithm cubic as well.
Theoretically, Gaussian elimination always
either yields an exact solution to a system of linear equations when the system
has a unique solution or discovers that no such solution exists. In the latter
case, the system will have either no solutions or infinitely many of them. In
practice, solving systems of significant size on a computer by this method is
not nearly so straightforward as the method would lead us to believe. The
principal difficulty lies in preventing an accumulation of round-off errors (see
Section 11.4). Consult textbooks on numerical analysis that analyze this and
other implementation issues in great detail.
LU Decomposition
Gaussian elimination has an interesting and
very useful byproduct called LU de-composition of the coefficient
matrix. In fact, modern commercial implementa-tions of Gaussian elimination are
based on such a decomposition rather than on the basic algorithm outlined
above.
EXAMPLE Let us return to the example in the beginning
of this section, where we applied Gaussian elimination to the matrix
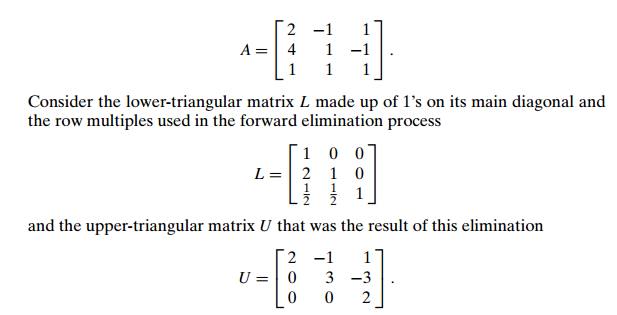
It turns out that the product LU of these matrices is equal to matrix A. (For this particular pair of L and U , you can verify this fact by direct
multiplication, but as a general proposition, it needs, of course, a proof,
which we omit here.)
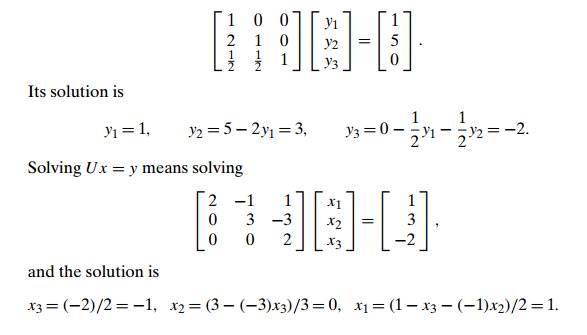
Therefore, solving the system Ax = b is equivalent to solving the system LU x = b. The latter system can be solved as follows. Denote y = U x, then Ly = b. Solve the system Ly = b first, which is easy to do because L is a lower-triangular matrix; then solve the system U x = y, with the upper-triangular matrix U , to find x. Thus, for the system at the beginning of this
section, we first solve Ly = b:
Note that once we have the LU decomposition of matrix A, we can solve systems Ax = b with as many right-hand side vectors b as we want to, one at a time. This is a
distinct advantage over the classic Gaussian elimination discussed earlier.
Also note that the LU decomposition does not actually require extra
memory, because we can store the nonzero part of U in the upper-triangular part of A (including the main diagonal) and store the nontrivial part of L below the main diagonal of A.
Computing a Matrix Inverse
Gaussian elimination is a very useful algorithm
that tackles one of the most important problems of applied mathematics: solving
systems of linear equations. In fact, Gaussian elimination can also be applied
to several other problems of linear algebra, such as computing a matrix inverse.
The inverse of an n ├Ś n matrix A is an n ├Ś n matrix, denoted AŌłÆ1, such that
AAŌłÆ1 = I,
where I is the n ├Ś n identity matrix (the matrix with all zero
elements except the main diagonal elements, which are all ones). Not every
square matrix has an inverse, but when it exists, the inverse is unique. If a
matrix A does not have an inverse, it is called singular. One can prove
that a matrix is singular if and only if one of its rows is a linear
combination (a sum of some multiples) of the other rows. A convenient way to
check whether a matrix is nonsingular is to apply Gaussian elimination: if it
yields an upper-triangular matrix with no zeros on the main diagonal, the
matrix is nonsingular; otherwise, it is singular. So being singular is a very
special situation, and most square matrices do have their inverses.
Theoretically, inverse matrices are very
important because they play the role of reciprocals in matrix algebra,
overcoming the absence of the explicit division operation for matrices. For
example, in a complete analogy with a linear equation in one unknown ax = b whose solution can be written as x = aŌłÆ1b (if a is not zero), we can express a solution to a
system of n equations in n unknowns Ax = b as x = AŌłÆ1b (if A is nonsingular) where b is, of course, a vector, not a number.
According to the definition of the inverse
matrix for a nonsingular n ├Ś n matrix A, to compute it we need to find n2 numbers
xij , 1 Ōēż i, j Ōēż n, such that

We can find the unknowns by solving n systems of linear equations that have the same coefficient matrix A, the vector of unknowns xj is the j th column of the inverse, and the right-hand
side vector ej is the j th column of the identity matrix
(1 Ōēż j Ōēż n):
Axj = ej .
We can solve these systems by applying Gaussian
elimination to matrix A aug-mented by the n ├Ś n identity matrix. Better yet, we can use
forward elimina-tion to find the LU decomposition of A and then solve the systems LU xj = ej , j = 1, . . . , n, as explained earlier.
Computing a Determinant
Another problem that can be solved by Gaussian
elimination is computing a determinant. The determinant of an n ├Ś n matrix A, denoted det A or |A|, is a number whose value can be defined
recursively as follows. If n = 1, i.e., if A consists of a single element a11, det A is equal to a11; for n > 1, det A is computed by the recursive formula
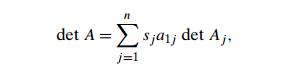
where sj is +1 if j is odd and ŌłÆ1 if j is even, a1j is the element in row 1 and column j , and Aj is the (n ŌłÆ 1) ├Ś (n ŌłÆ 1) matrix obtained from matrix A by deleting its row 1 and column j .
In particular, for a 2 ├Ś 2 matrix, the definition implies a formula that is easy to
remember:

In other words, the determinant of a 2 ├Ś 2 matrix is simply equal to the difference between the products of
its diagonal elements.
For a 3 ├Ś 3 matrix, we get
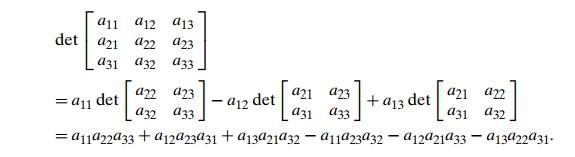
Incidentally, this formula is very handy in a
variety of applications. In particular, we used it twice already in Section 5.5
as a part of the quickhull algorithm.
But what if we need to compute a determinant of
a large matrix? Although this is a task that is rarely needed in practice, it
is worth discussing nevertheless. Using the recursive definition can be of
little help because it implies computing the sum of n! terms. Here, Gaussian elimination comes to
the rescue again. The central point is the fact that the determinant of an
upper-triangular matrix is equal to the product of elements on its main
diagonal, and it is easy to see how elementary operations employed by the
elimination algorithm influence the determinantŌĆÖs value. (Basically, it either
remains unchanged or changes a sign or is multiplied by the constant used by
the elimination algorithm.) As a result, we can compute the determinant of an n ├Ś n matrix in cubic time.
Determinants play an important role in the
theory of systems of linear equa-tions. Specifically, a system of n linear equations in n unknowns Ax = b has a unique solution if and only if the
determinant of its coefficient matrix det A is
not equal to zero. Moreover, this solution can
be found by the formulas called
CramerŌĆÖs rule,

where det Aj is the determinant of the matrix obtained by
replacing the j th column of A by the column b. You are asked to investigate in the exercises
whether using CramerŌĆÖs rule is a good algorithm for solving systems of linear
equations.
Exercises 6.2
Q. Solve the following system by Gaussian
elimination:
x1 + x2 + x3 = 2 2x1 + x2 + x3 = 3 x1 ŌłÆ x2 + 3x3 = 8.
Q.
a. Solve the system of the previous question by the LU decomposition method.
From the
standpoint of general algorithm design techniques, how would you classify the LU decomposition method?
Q. Solve the system of Problem 1 by computing the inverse of its coefficient matrix and then multiplying it by the vector on the right-hand side.
Q. Would it be correct to get the efficiency class
of the forward elimination stage of Gaussian elimination as follows?
Write
pseudocode for the back-substitution stage of Gaussian elimination and show
that its running time is in (n2).
Assuming that division of two numbers takes
three times longer than their multiplication, estimate how much faster BetterForwardElimination is than ForwardElimination. (Of course, you
should also assume that a compiler is not
going to eliminate the inefficiency in ForwardElimination.)
Q. a. Give an example of a system of two linear equations in two unknowns that has a unique solution and solve it by Gaussian elimination.
Give an
example of a system of two linear equations in two unknowns that has no
solution and apply Gaussian elimination to it.
Give an
example of a system of two linear equations in two unknowns that has infinitely
many solutions and apply Gaussian elimination to it.
Q. The Gauss-Jordan elimination method differs from Gaussian elimination in that the elements above the main diagonal of the coefficient matrix are made zero at the same time and by the same use of a pivot row as the elements below the main diagonal.
Apply
the Gauss-Jordan method to the system of Problem 1 of these exercises.
What
general design strategy is this algorithm based on?
In
general, how many multiplications are made by this method in solving a system
of n equations in n unknowns? How does this compare with the
number of multiplications made by the Gaussian elimination method in both its
elimination and back-substitution stages?
Q. A system Ax = b of n linear equations in n unknowns has a unique solution if and only if det A = 0. Is it a good idea to check this condition before applying Gaussian elimination to the system?
Q. a. Apply CramerŌĆÖs rule to solve the system of Problem 1 of these exercises.
Estimate
how many times longer it will take to solve a system of n linear equations in n unknowns by CramerŌĆÖs rule than by Gaussian
elimination. Assume that all the determinants in CramerŌĆÖs rule formulas are
computed independently by Gaussian elimination.
Q. Lights out This one-person game is played on an n ├Ś n board composed of 1 ├Ś 1 light panels. Each panel has a switch that can be turned on and
off, thereby toggling the on/off state of this and four vertically and
horizontally adjacent panels. (Of course, toggling a corner square affects a
total of three panels, and toggling a noncorner panel on the boardŌĆÖs border
affects a total of four squares.) Given an initial subset of lighted squares,
the goal is to turn all the lights off.
Show
that an answer can be found by solving a system of linear equations with 0/1
coefficients and right-hand sides using the modulo 2 arithmetic.
Use
Gaussian elimination to solve the 2 ├Ś 2 ŌĆ£all-onesŌĆØ instance of this problem, where
all the panels of the 2 ├Ś 2 board are initially lit.
Use Gaussian elimination to solve the 3 ├Ś 3 ŌĆ£all-onesŌĆØ instance of this problem, where all the panels of the
3 ├Ś 3 board are initially lit.
Related Topics