Chapter: Digital Signal Processing : IIR Filter Design
Difference Between FIR Filter and IIR Filter
TYPES OF DIGITAL FILTER
Digital
filters are of two types. Finite Impulse Response Digital Filter & Infinite
Impulse Response Digital Filter
DIFFERENCE BETWEEN FIR FILTER AND
IIR FILTER
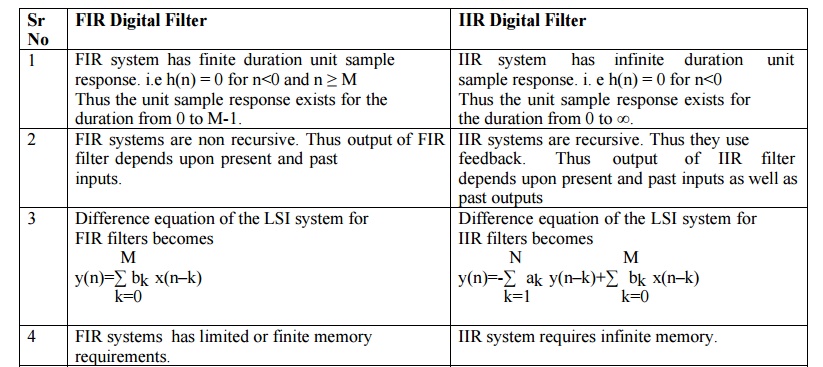
FIR Digital Filter
1. FIR
system has finite duration unit sample response. i.e h(n) = 0 for n<0 and n
≥ M Thus the unit sample response exists for the duration from 0 to M-1.
2. FIR
systems are non recursive. Thus output of FIR filter depends upon present and
past inputs.
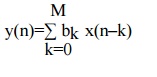
3. Difference equation of the LSI system for FIR filters becomes
4. FIR
systems has limited or finite memory requirements.
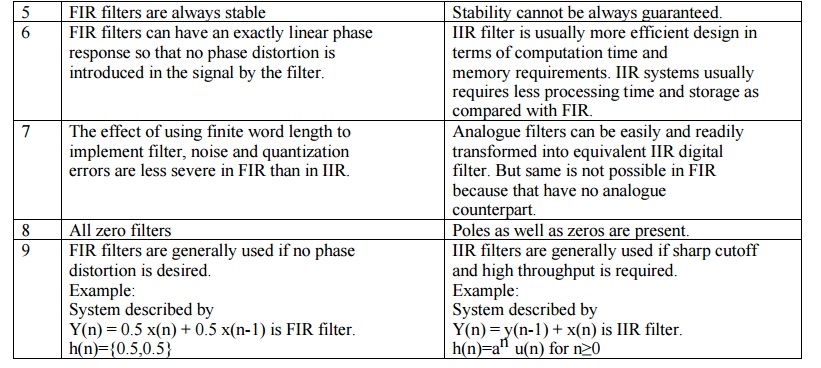
5. FIR
filters are always stable
6. FIR
filters can have an exactly linear phase response so that no phase distortion
is introduced in the signal by the filter.
7. The
effect of using finite word length to implement filter, noise and quantization
errors are less severe in FIR than in IIR.
8. All
zero filters
9. FIR
filters are generally used if no phasedistortion is desired.
Example:
System
described by
Y(n) =
0.5 x(n) + 0.5 x(n-1) is FIR filter.
h(n)={0.5,0.5}
IIR Digital Filter
1. IIR
system has infinite duration unit sample response. i. e h(n) = 0 for n<0
Thus the unit sample response exists for the duration from 0 to ∞.
2. IIR
systems are recursive. Thus they use feedback. Thus output of IIR filter
depends upon present and past inputs as well as past outputs
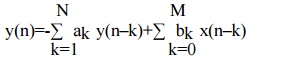
3. Difference equation of the LSI system for IIR filters becomes
4. IIR
system requires infinite memory.
5.
Stability cannot be always guaranteed.
6. IIR
filter is usually more efficient design in terms of computation time and memory
requirements. IIR systems usually requires less processing time and storage as
compared with FIR.
7.
Analogue filters can be easily and readily transformed into equivalent IIR
digital filter. But same is not possible in FIR because that have no analogue
counterpart.
8. Poles
as well as zeros are present.
9. IIR
filters are generally used if sharp cutoff and high throughput is required.
Example:
System
described by
Y(n) =
y(n-1) + x(n) is IIR filter.
h(n)=an
u(n) for n≥0
Related Topics