Chapter: Introduction to the Design and Analysis of Algorithms : Coping with the Limitations of Algorithm Power
Backtracking
Backtracking
Throughout the book (see in
particular Sections 3.4 and 11.3), we have encoun-tered problems that require
finding an element with a special property in a domain that grows exponentially
fast (or faster) with the size of the problem’s input: a Hamiltonian circuit
among all permutations of a graph’s vertices, the most valu-able subset of
items for an instance of the knapsack problem, and the like. We addressed in
Section 11.3 the reasons for believing that many such problems might not be
solvable in polynomial time. Also recall that we discussed in Section 3.4 how
such problems can be solved, at least in principle, by exhaustive search. The
exhaustive-search technique suggests generating all candidate solutions and
then identifying the one (or the ones) with a desired property.
Backtracking is a more
intelligent variation of this approach. The principal idea is to construct
solutions one component at a time and evaluate such partially constructed
candidates as follows. If a partially constructed solution can be de-veloped
further without violating the problem’s constraints, it is done by taking the
first remaining legitimate option for the next component. If there is no
legiti-mate option for the next component, no alternatives for any remaining component need to be
considered. In this case, the algorithm backtracks to replace the last
component of the partially constructed solution with its next option.
It is convenient to implement
this kind of processing by constructing a tree of choices being made, called
the state-space
tree. Its root represents an initial state before the search for a
solution begins. The nodes of the first level in the tree represent the choices
made for the first component of a solution, the nodes of the second level
represent the choices for the second component, and so on. A node in a
state-space tree is said to be promising if it corresponds to a
partially constructed solution that may still lead to a complete solution;
otherwise,
it is called nonpromising.
Leaves represent either nonpromising dead ends or complete solutions found by
the algorithm. In the majority of cases, a state-space tree for a backtracking
algorithm is constructed in the manner of depth-first search. If the current
node is promising, its child is generated by adding the first remaining
legitimate option for the next component of a solution, and the processing
moves to this child. If the current node turns out to be nonpromising, the
algorithm backtracks to the node’s parent to consider the next possible option
for its last component; if there is no such option, it backtracks one more
level up the tree, and so on. Finally, if the algorithm reaches a complete solution
to the problem, it either stops (if just one solution is required) or continues
searching for other possible solutions.
n-Queens Problem
As our first example, we use
a perennial favorite of textbook writers: the n-queens problem.
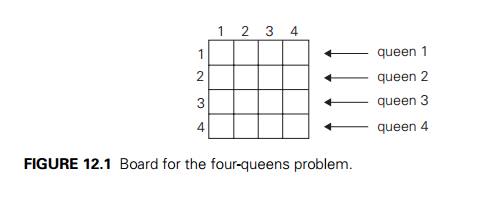
The problem is to place n queens on an n × n chessboard so that no two queens
attack each other by being in the same row or in the same column or on the same
diagonal. For n = 1, the problem has a trivial
solution, and it is easy to see that there is no solution for n = 2 and n = 3. So let us consider the four-queens problem
and solve it by the backtracking technique. Since each of the four queens has
to be placed in its own row, all we need to do is to assign a column for each
queen on the board presented in Figure 12.1.
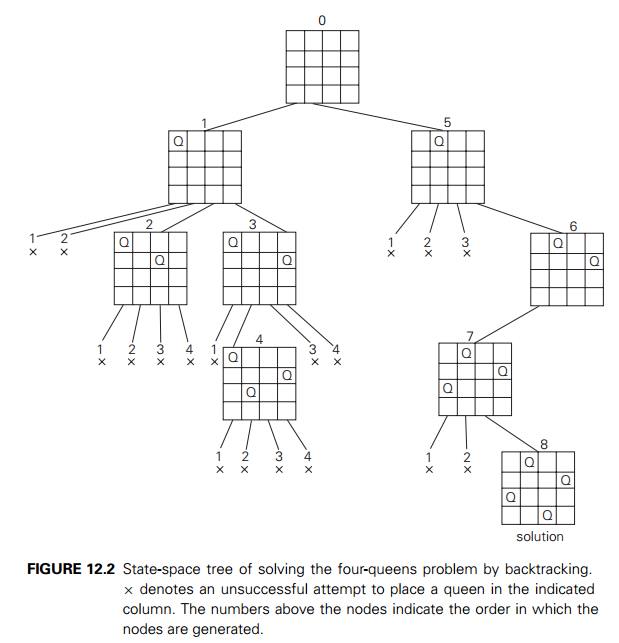
We start with the empty board
and then place queen 1 in the first possible position of its row, which is in
column 1 of row 1. Then we place queen 2, after trying unsuccessfully columns 1
and 2, in the first acceptable position for it, which is square (2, 3), the
square in row 2 and column 3. This proves to be a dead end because there is no
acceptable position for queen 3. So, the algorithm backtracks and puts queen 2
in the next possible position at (2, 4). Then queen 3 is placed at (3, 2),
which proves to be another dead end. The algorithm then backtracks all the way
to queen 1 and moves it to (1, 2). Queen 2 then goes to (2, 4), queen 3 to (3,
1), and queen 4 to (4, 3), which is a solution to the problem. The state-space
tree of this search is shown in Figure 12.2.
If other solutions need to be
found (how many of them are there for the four-queens problem?), the algorithm
can simply resume its operations at the leaf at which it stopped.
Alternatively, we can use the board’s symmetry for this purpose.
Finally, it should be pointed
out that a single solution to the n-queens
problem for any n ≥ 4 can be found in linear time. In fact, over
the last 150 years mathe-maticians have discovered several alternative formulas
for nonattacking positions of n queens [Bel09]. Such
positions can also be found by applying some general algorithm design
strategies (Problem 4 in this section’s exercises).
Hamiltonian
Circuit Problem
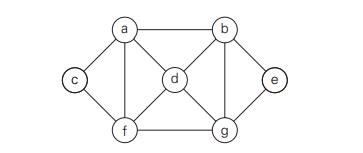
As our next example, let us
consider the problem of finding a Hamiltonian circuit in the graph in Figure
12.3a.
Without loss of generality,
we can assume that if a Hamiltonian circuit exists, it starts at vertex a. Accordingly, we make vertex a the root of the state-space
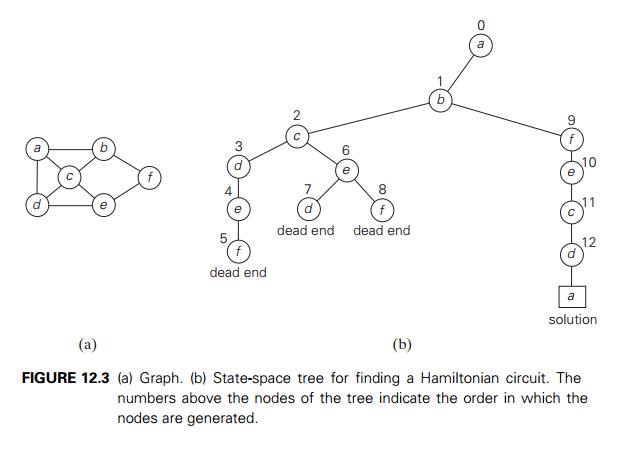
tree (Figure 12.3b). The
first component of our future solution, if it exists, is a first intermediate
vertex of a Hamiltonian circuit to be constructed. Using the alphabet order to
break the three-way tie among the vertices adjacent to a, we select vertex b. From b, the algorithm proceeds to c, then to d, then to e, and finally to f, which proves to be a dead end. So the
algorithm backtracks from f to e, then to d, and then to c, which provides the first alternative for the
algorithm to pursue. Going from c to e eventually proves useless, and the algorithm
has to backtrack from e to c and then to b. From there, it goes to the vertices f , e, c, and d, from which it can legitimately return to a, yielding the Hamiltonian circuit a, b, f , e, c, d, a. If we wanted to find another Hamiltonian
circuit, we could continue this process by backtracking
from the leaf of the solution found.
Subset-Sum
Problem
As our last example, we
consider the subset-sum problem: find a subset of a given set A = {a1, . . . , an} of n positive integers whose sum
is equal to a given positive integer d. For example, for A = {1, 2, 5, 6, 8} and d = 9, there are two solutions: {1, 2, 6} and {1, 8}. Of course, some instances of this problem may
have no solutions.
It is convenient to sort the
set’s elements in increasing order. So, we will assume that
a1 < a2 < . . . < an.
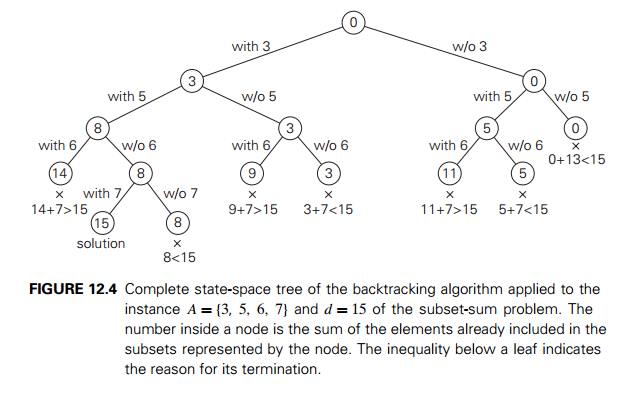
The state-space tree can be
constructed as a binary tree like that in Figure 12.4 for the instance A = {3, 5, 6, 7} and d = 15. The root of the tree
represents the starting point, with no decisions about the given elements made
as yet. Its left and right children represent, respectively, inclusion and
exclusion of a1 in a set being sought.
Similarly, going to the left from a node of the first level corresponds to
inclusion of a2 while going to the right
corresponds to its exclusion, and so on. Thus, a path from the root to a node
on the ith level of the tree
indicates which of the first i numbers have been included
in the subsets represented by that node.
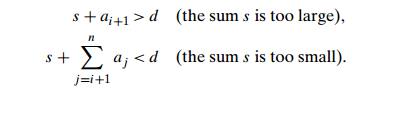
We record the value of s, the sum of these numbers, in the node. If s is equal to d, we have a solution to the problem. We can
either report this result and stop or, if all the solutions need to be found,
continue by backtracking to the node’s parent. If s is not equal to d, we can terminate the node as nonpromising if
either of the following two inequalities holds:
General
Remarks
From a more general
perspective, most backtracking algorithms fit the follow-ing description. An
output of a backtracking algorithm can be thought of as an n-tuple (x1, x2, . . . , xn) where each coordinate xi is an element of some finite linearly ordered
set Si. For example, for the n-queens problem, each Si is the set of integers (column numbers) 1
through n. The tuple may need to
satisfy some additional constraints (e.g., the nonattacking requirements in the
n-queens prob-lem). Depending
on the problem, all solution tuples can be of the same length (the n-queens and the Hamiltonian circuit problem)
and of different lengths (the subset-sum problem). A backtracking algorithm
generates, explicitly or implic-itly, a state-space tree; its nodes represent
partially constructed tuples with the first i coordinates defined by the earlier actions of
the algorithm. If such a tuple (x1, x2, . . . , xi) is not a solution, the algorithm finds the next
element in Si+1 that is consistent with the values
of (x1, x2, . . . , xi) and the problem’s constraints, and adds it to
the tuple as its (i + 1)st coordinate. If such an
element does not exist, the algorithm backtracks to consider the next value of xi, and so on.
To start a backtracking
algorithm, the following pseudocode can be called for i = 0 ; X[1..0] represents the empty tuple.
ALGORITHM Backtrack(X[1..i])
//Gives a template of a
generic backtracking algorithm
//Input: X[1..i] specifies first i promising components of a solution //Output:
All the tuples representing the problem’s solutions
if X[1..i] is a solution write X[1..i]
else //see Problem 9 in
this section’s exercises
for each element x ∈ Si+1 consistent with X[1..i] and the constraints do
X[i + 1] ← x
Backtrack(X[1..i + 1])
Our success in solving small
instances of three difficult problems earlier in this section should not lead you
to the false conclusion that backtracking is a very efficient technique. In the
worst case, it may have to generate all possible candidates in an exponentially
(or faster) growing state space of the problem at hand. The hope, of course, is
that a backtracking algorithm will be able to prune enough branches of its
state-space tree before running out of time or memory or both. The success of
this strategy is known to vary widely, not only from problem to problem but
also from one instance to another of the same problem.
There are several tricks that
might help reduce the size of a state-space tree. One is to exploit the
symmetry often present in combinatorial problems. For example, the board of the
n-queens problem has several
symmetries so that some solutions can be obtained from others by reflection or
rotation. This implies, in particular, that we need not consider placements of
the first queen in the last n/2 columns, because any
solution with the first queen in square (1,
i), n/2 ≤ i ≤ n, can be obtained by
reflection (which?) from a solution with the first queen in square (1,
n − i + 1). This observation cuts the
size of the tree by about half. Another trick is to preassign values to one or
more components of a solution, as we did in the Hamiltonian circuit example.
Data presorting in the subset-sum example demonstrates potential benefits of
yet another opportunity: rearrange data of an instance given.
It would be highly desirable
to be able to estimate the size of the state-space tree of a backtracking
algorithm. As a rule, this is too difficult to do analytically, however. Knuth
[Knu75] suggested generating a random path from the root to a leaf and using
the information about the number of choices available during the path
generation for estimating the size of the tree. Specifically, let c1 be the number of values of the first component
x1 that are consistent with the
problem’s constraints. We randomly select one of these values (with equal probability
1/c1) to move to one of the
root’s c1 children. Repeating this
operation for c2 possible values for x2 that are consistent with x1 and the other constraints, we move to one of
the c2 children of that node. We
continue this process until a leaf is reached after randomly selecting values
for x1, x2, . . . , xn. By assuming that the nodes on level i have ci children on average, we estimate the number of
nodes in the tree as
1 + c1 + c1c2 + . . . + c1c2 . . . cn.
Generating several such
estimates and computing their average yields a useful estimation of the actual
size of the tree, although the standard deviation of this random variable can
be large.
In conclusion, three things
on behalf of backtracking need to be said. First, it is typically applied to
difficult combinatorial problems for which no efficient algo-rithms for finding
exact solutions possibly exist. Second, unlike the exhaustive-search approach,
which is doomed to be extremely slow for all instances of a problem,
backtracking at least holds a hope for solving some instances of nontriv-ial
sizes in an acceptable amount of time. This is especially true for optimization
problems, for which the idea of backtracking can be further enhanced by
evaluat-ing the quality of partially constructed solutions. How this can be
done is explained in the next section. Third, even if backtracking does not
eliminate any elements of a problem’s state space and ends up generating all
its elements, it provides a specific technique for doing so, which can be of value
in its own right.
Exercises 12.1
a. Continue the backtracking
search for a solution to the four-queens prob-lem, which was started in this
section, to find the second solution to the problem.
Explain how the board’s symmetry can be used to find the second
solution to the four-queens problem.
a. Which is the last solution to the five-queens problem
found by the back-tracking algorithm?
Use the board’s symmetry to
find at least four other solutions to the problem.
a. Implement the backtracking
algorithm for the n-queens problem in the lan-guage of your
choice. Run your program for a sample of n values to get the numbers of nodes in the
algorithm’s state-space trees. Compare these num-bers with the numbers of
candidate solutions generated by the exhaustive-search algorithm for this
problem (see Problem 9 in Exercises 3.4).
For each value of n for which you run your
program in part (a), estimate the size of the state-space tree by the method described
in Section 12.1 and compare the estimate with the actual number of nodes you
obtained.
Design a linear-time algorithm that finds a solution to the n-queens problem for any n ≥ 4.
Apply backtracking to the
problem of finding a Hamiltonian circuit in the following graph.
Apply backtracking to solve the 3-coloring problem for the graph in
Fig-ure 12.3a.
Generate all permutations of {1, 2, 3, 4} by backtracking.
a. Apply backtracking to solve
the following instance of the subset sum
problem: A = {1, 3, 4, 5} and d = 11.
Will the backtracking algorithm work correctly if we use just one
of the two inequalities to terminate a node as nonpromising?
The general template for backtracking algorithms, which is given in
the sec-tion, works correctly only if no solution is a prefix to another
solution to the problem. Change the template’s pseudocode to work correctly
without this restriction.
Write a program implementing a backtracking algorithm for
the Hamiltonian circuit problem.
the m-coloring problem.
Puzzle pegs This puzzle-like game is played on a board with 15 small holes arranged in an equilateral triangle. In
an initial position, all but one of the holes are occupied by pegs, as in the
example shown below. A legal move is a jump of a peg over its immediate
neighbor into an empty square opposite; the jump removes the jumped-over
neighbor from the board.

Design and implement a
backtracking algorithm for solving the following versions of this puzzle.
Starting with a given location of the empty hole, find a shortest
sequence of moves that eliminates 14 pegs with no limitations on the final
position of the remaining peg.
Starting with a given location of the empty hole, find a shortest
sequence of moves that eliminates 14 pegs with the remaining peg at the empty
hole of the initial board.
Related Topics