Chapter: Introduction to the Design and Analysis of Algorithms : Coping with the Limitations of Algorithm Power
Approximation Algorithms for the Traveling Salesman Problem
Approximation Algorithms for the Traveling Salesman Problem
We solved the traveling
salesman problem by exhaustive search in Section 3.4, mentioned its decision
version as one of the most well-known NP-complete
problems in Section 11.3, and saw how its instances can be solved by a
branch-and-bound algorithm in Section 12.2. Here, we consider several
approximation algorithms, a small sample of dozens of such algorithms suggested
over the years for this famous problem.
But first let us answer the
question of whether we should hope to find a polynomial-time approximation
algorithm with a finite performance ratio on all instances of the traveling
salesman problem. As the following theorem [Sah76] shows, the answer turns out
to be no, unless P = N
P .
THEOREM
1 If P != NP, there exists no c-approximation algorithm for the traveling salesman problem,
i.e., there exists no polynomial-time approximation algorithm for this problem
so that for all instances
PROOF
By way
of contradiction, suppose that such an approximation algorithm A and a constant c exist. (Without loss of generality, we can
assume that c is a positive integer.) We will show that this
algorithm could then be used for solving the Hamiltonian circuit problem in
polynomial time. We will take advantage of a variation of the transformation
used in Section 11.3 to reduce the Hamiltonian circuit problem to the traveling
salesman problem. Let G be an arbitrary graph with n vertices. We map G to a complete weighted graph G by assigning weight 1 to each edge in G and adding an edge of weight cn + 1 between each pair of vertices not adjacent
in G. If G has a Hamiltonian circuit, its length in G is n; hence, it is the exact
solution s∗ to the traveling salesman problem for G . Note that if sa is an approximate solution obtained for G by algorithm A, then f (sa) ≤ cn by the assumption. If G does not have a Hamiltonian circuit in G, the shortest tour in G will contain at least one edge of weight cn + 1, and hence f (sa) ≥ f (s∗) > cn. Taking into account the two
derived inequalities, we could solve the Hamiltonian circuit problem for graph G in polynomial time by mapping G to G , applying algorithm A to get tour sa in G , and comparing its length
with cn. Since the Hamiltonian
circuit problem is NP-complete, we
have a contradiction unless P =
NP.
Greedy Algorithms for the TSP The simplest approximation
algorithms for the traveling
salesman problem are based on the greedy technique. We will discuss here two
such algorithms.
Nearest-neighbor
algorithm
The following well-known
greedy algorithm is based on the nearest-neighbor heuristic: always
go next to the nearest unvisited city.
Step 1 Choose an arbitrary city as the start.
Step 2 Repeat the following operation until all the cities have been
visited: go to the unvisited city
nearest the one visited last (ties can be broken arbitrarily).
Step 3 Return to the starting city.
EXAMPLE
1 For the instance represented by the graph in Figure 12.10, with a as the starting vertex, the nearest-neighbor
algorithm yields the tour (Hamiltonian circuit) sa: a − b − c − d − a of length 10.
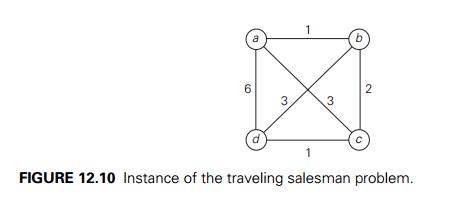
The optimal solution, as can
be easily checked by exhaustive search, is the tour s∗: a − b − d − c − a of length 8. Thus, the
accuracy ratio of this approximation is
Unfortunately, except for its
simplicity, not many good things can be said about the nearest-neighbor
algorithm. In particular, nothing can be said in general about the accuracy of
solutions obtained by this algorithm because it can force us to traverse a very
long edge on the last leg of the tour. Indeed, if we change the weight of edge (a, d) from 6 to an arbitrary large number w ≥ 6 in Example 1, the algorithm will still yield
the tour a − b − c − d − a of length 4 + w, and the optimal solution
will still be a − b − d − c − a of length 8. Hence,
which can be made as large as we wish by
choosing an appropriately large value of w. Hence, RA = ∞ for this algorithm (as it should be according
to Theorem 1).
Multifragment-heuristic
algorithm
Another natural greedy
algorithm for the traveling salesman problem considers it as the problem of
finding a minimum-weight collection of edges in a given complete weighted graph
so that all the vertices have degree 2. (With this emphasis on edges rather
than vertices, what other greedy algorithm does it remind you of?) An
application of the greedy technique to this problem leads to the following
algorithm [Ben90].
Step 1 Sort the edges in increasing order of their weights. (Ties can be
broken arbitrarily.) Initialize the
set of tour edges to be constructed to the empty set.
Step 2 Repeat this step n times, where n is the number of cities in
the instance being solved: add the
next edge on the sorted edge list to the set of tour edges, provided this
addition does not create a vertex of degree 3 or a cycle of length less than n; otherwise, skip the edge.
Step 3 Return the set of tour edges.
As an example, applying the
algorithm to the graph in Figure 12.10 yields {(a, b), (c, d), (b, c), (a, d)}.
This set
of edges forms the same tour as the one pro-duced by the nearest-neighbor
algorithm. In general, the multifragment-heuristic algorithm tends to produce
significantly better tours than the nearest-neighbor algorithm, as we are going
to see from the experimental data quoted at the end of this section. But the
performance ratio of the multifragment-heuristic algorithm is also unbounded,
of course.
There is, however, a very
important subset of instances, called Euclidean, for which we can make a
nontrivial assertion about the accuracy of both the nearest-neighbor and
multifragment-heuristic algorithms. These are the instances in which intercity
distances satisfy the following natural conditions:
triangle inequality d[i, j ] ≤ d[i, k] + d[k,
j ] for any triple of cities i, j, and k (the distance between cities i and j
cannot exceed the length of a two-leg path from i to some intermediate city k to j )
![]()
symmetry d[i, j ] = d[j, i] for any pair of cities i and j (the distance from i to j is the same as the distance from j to i)
![]()
A substantial majority of
practical applications of the traveling salesman prob-lem are its Euclidean
instances. They include, in particular, geometric ones, where cities correspond
to points in the plane and distances are computed by the standard Euclidean
formula. Although the performance ratios of the nearest-neighbor and
multifragment-heuristic algorithms remain unbounded for Euclidean instances,
their accuracy ratios satisfy the following inequality for any such instance
with n ≥ 2 cities:
where f (sa) and f (s∗) are the lengths of the heuristic tour and
shortest tour, respectively (see [Ros77] and [Ong84]).
Minimum-Spanning-Tree–Based Algorithms There
are approximation algori-thms for the traveling salesman problem that exploit a
connection between Hamil-tonian circuits and spanning trees of the same graph.
Since removing an edge from a Hamiltonian circuit yields a spanning tree, we
can expect that the structure of a minimum spanning tree provides a good basis
for constructing a shortest tour approximation. Here is an algorithm that
implements this idea in a rather straight-forward fashion.
Twice-around-the-tree
algorithm
Step 1 Construct a minimum spanning tree of the graph corresponding to a given instance of the traveling
salesman problem.
Step 2 Starting at an arbitrary vertex, perform a walk around the minimum spanning tree recording all the
vertices passed by. (This can be done by a DFS traversal.)
Step 3 Scan the vertex list obtained in Step 2 and eliminate from it all
repeated occurrences of the same
vertex except the starting one at the end of the list. (This step is equivalent
to making shortcuts in the walk.) The vertices remaining on the list will form
a Hamiltonian circuit, which is the output of the algorithm.
EXAMPLE
2 Let us apply this algorithm to the graph in Figure 12.11a. The minimum spanning tree of this
graph is made up of edges (a,
b), (b, c), (b,
d), and (d,
e) (Figure 12.11b). A twice-around-the-tree walk
that starts and ends at a
is
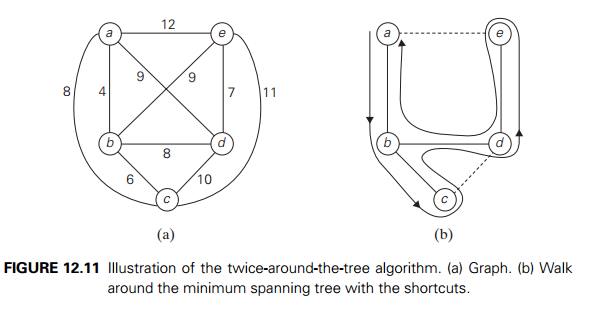
a, b, c, b, d, e, d, b, a.
Eliminating the second b (a shortcut from c to d), the second d, and the third b (a shortcut from e to a) yields the Hamiltonian
circuit
a, b, c, d, e, a
of length 39.
The tour obtained in Example
2 is not optimal. Although that instance is small enough to find an optimal
solution by either exhaustive search or branch-and-bound, we refrained from
doing so to reiterate a general point. As a rule, we do not know what the
length of an optimal tour actually is, and therefore we cannot compute the
accuracy ratio f
(sa)/f (s∗). For the twice-around-the-tree algorithm, we
can at least estimate it above, provided the graph is Euclidean.
THEOREM
2 The twice-around-the-tree algorithm is a 2-approximation algo-rithm
for the traveling salesman problem with Euclidean distances.
PROOF
Obviously,
the twice-around-the-tree algorithm is polynomial time if we use a reasonable algorithm
such as Prim’s or Kruskal’s in Step 1. We need to show that for any Euclidean
instance of the traveling salesman problem, the length of a tour sa obtained by the twice-around-the-tree
algorithm is at most twice the length of the optimal tour s∗, i.e.,
f (sa) ≤ 2f
(s∗).
Since removing any edge from s∗ yields a spanning tree T of weight w(T ), which must be greater than or equal to the
weight of the graph’s minimum spanning tree w(T ∗), we get the inequality
f (s∗) > w(T ) ≥ w(T ∗).
This inequality implies that
2f (s∗) > 2w(T ∗) = the length of the walk obtained in Step 2 of
the algorithm.
The possible shortcuts
outlined in Step 3 of the algorithm to obtain sa cannot increase the total length of the walk
in a Euclidean graph, i.e.,
the length of the walk
obtained in Step 2 ≥ the length of the tour sa.
Combining the last two
inequalities, we get the inequality
2f (s∗) > f (sa),
which is, in fact, a slightly
stronger assertion than the one we needed to prove.
Christofides Algorithm There is an approximation algorithm with a
better per-formance ratio for the Euclidean traveling salesman problem—the
well-known Christofides algorithm [Chr76]. It also uses a minimum spanning
tree but does this in a more sophisticated way than the
twice-around-the-tree algorithm. Note that a twice-around-the-tree walk
generated by the latter algorithm is an Eule-rian circuit in the multigraph
obtained by doubling every edge in the graph given. Recall that an Eulerian
circuit exists in a connected multigraph if and only if all its vertices have
even degrees. The Christofides algorithm obtains such a multi-graph by adding
to the graph the edges of a minimum-weight matching of all the odd-degree
vertices in its minimum spanning tree. (The number of such vertices is always
even and hence this can always be done.) Then the algorithm finds an Eulerian
circuit in the multigraph and transforms it into a Hamiltonian circuit by
shortcuts, exactly the same way it is done in the last step of the
twice-around-the-tree algorithm.
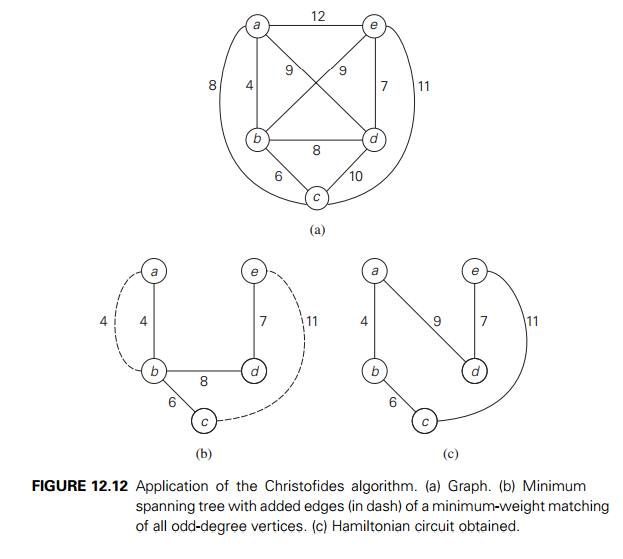
EXAMPLE
3 Let us trace the Christofides algorithm in Figure 12.12 on the same instance (Figure 12.12a) used
for tracing the twice-around-the-tree algorithm in Figure 12.11. The graph’s
minimum spanning tree is shown in Figure 12.12b. It has four odd-degree
vertices: a, b, c, and e. The minimum-weight matching of these four
vertices consists of edges (a,
b) and (c,
e). (For this tiny instance, it can be found easily by comparing the
total weights of just three alternatives: (a, b) and (c, e), (a, c) and (b, e), (a, e) and (b, c).) The traversal of the multigraph, starting at vertex a, produces the Eulerian circuit a − b − c − e − d − b − a, which, after one shortcut,
yields the tour a − b − c − e − d − a of length 37.
The performance ratio of the
Christofides algorithm on Euclidean instances is 1.5 (see, e.g., [Pap82]). It
tends to produce significantly better approximations to optimal tours than the
twice-around-the-tree algorithm does in empirical tests. (We quote some results
of such tests at the end of this subsection.) The quality of a tour obtained by
this heuristic can be further improved by optimizing shortcuts made on the last
step of the algorithm as follows: examine the multiply-visited cities in some
arbitrary order and for each make the best possible shortcut. This
enhancement would have not
improved the tour a − b − c − e − d − a obtained in Example 3 from a − b − c − e − d − b − a because shortcutting the
second occur-rence of b happens to be better than
shortcutting its first occurrence. In general, however, this enhancement tends
to decrease the gap between the heuristic and optimal tour lengths from about
15% to about 10%, at least for randomly gener-ated Euclidean instances [Joh07a].
Local Search Heuristics For Euclidean instances, surprisingly good
approxima-tions to optimal tours can be obtained by iterative-improvement
algorithms, which are also called local search heuristics. The
best-known of these are the 2-opt, 3-opt, and
Lin-Kernighan algorithms. These algorithms start with some initial
tour,
e.g., constructed randomly or by some simpler approximation algorithm
such as the nearest-neighbor. On each iteration, the algorithm explores a
neighborhood around the current tour by replacing a few edges in the current
tour by other edges. If the changes produce a shorter tour, the algorithm makes
it the current
tour and continues by
exploring its neighborhood in the same manner; otherwise, the current tour is
returned as the algorithm’s output and the algorithm stops.
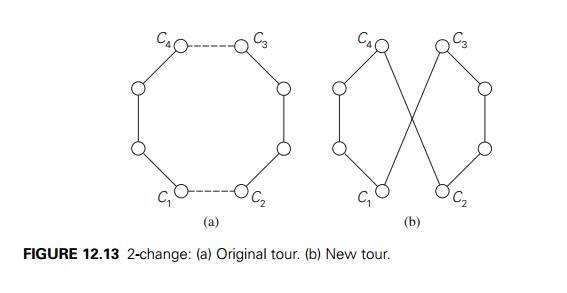
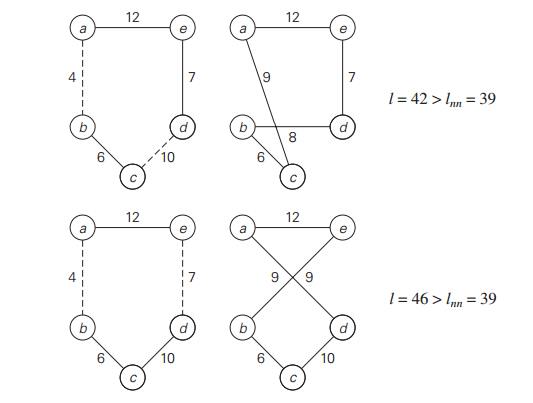
The 2-opt algorithm works by
deleting a pair of nonadjacent edges in a tour and reconnecting their endpoints
by the different pair of edges to obtain another tour (see Figure 12.13). This
operation is called the 2-change. Note that there is only
one way to reconnect the endpoints because the alternative produces two
disjoint fragments.
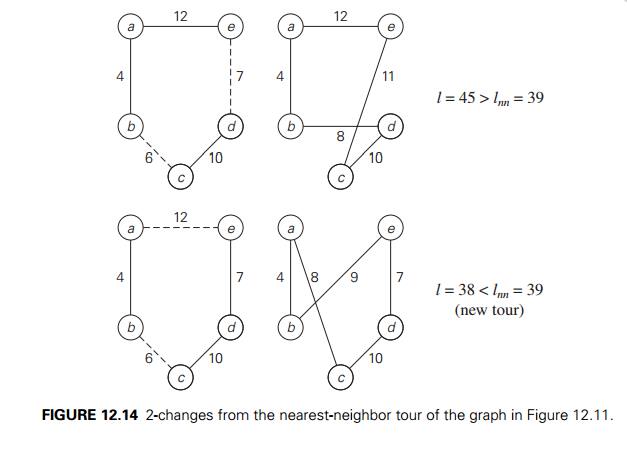
EXAMPLE
4 If we start with the nearest-neighbor tour a − b − c − d − e − a in the graph of Figure 12.11,
whose length lnn is equal to 39, the 2-opt algorithm will move
to the next tour as shown in Figure 12.14.
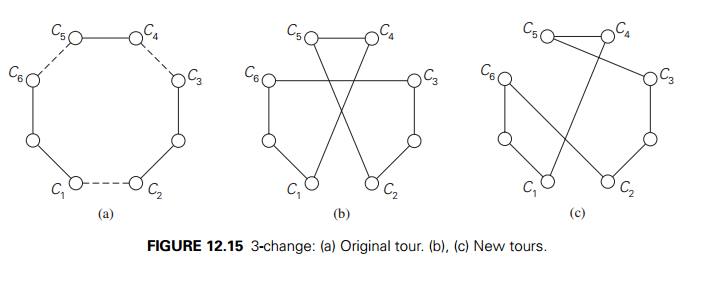
To generalize the notion of
the 2-change, one can consider the k-change for any k ≥ 2. This operation replaces up to k edges in a current tour. In addition to 2-changes,
only the 3-changes have proved to be of practical interest. The two principal
possibilities of 3-changes are shown in Figure 12.15.
There are several other local
search algorithms for the traveling salesman problem. The most prominent of
them is the Lin-Kernighan algorithm [Lin73], which for two decades after
its publication in 1973 was considered the best algo-rithm to obtain
high-quality approximations of optimal tours. The Lin-Kernighan algorithm is a
variable-opt algorithm: its move can be viewed as a 3-opt move followed by a
sequence of 2-opt moves. Because of its complexity, we have to re-frain from
discussing this algorithm here. The excellent survey by Johnson and McGeoch
[Joh07a] contains an outline of the algorithm and its modern exten-sions as
well as methods for its efficient implementation. This survey also contain
results from the important empirical studies about performance of many
heuris-tics for the traveling salesman problem, including of course, the
Lin-Kernighan algorithm. We conclude our discussion by quoting some of these
data.
Empirical Results The traveling salesman problem has been the
subject of in-tense study for the last 50 years. This interest was driven by a
combination of pure theoretical interest and serious practical needs stemming from such
newer ap-plications as circuit-board and VLSI-chip fabrication, X-ray
crystallography, and genetic engineering. Progress in developing effective
heuristics, their efficient im-plementation by using sophisticated data
structures, and the ever-increasing power of computers have led to a situation
that differs drastically from a pessimistic pic-ture painted by the worst-case
theoretical results. This is especially true for the most important
applications class of instances of the traveling salesman problem: points in
the two-dimensional plane with the standard Euclidean distances be-tween them.
Nowadays, Euclidean instances
with up to 1000 cities can be solved exactly in quite a reasonable amount of
time—typically, in minutes or faster on a good workstation—by such optimization
packages as Concord [App]. In fact,
according to the information on the Web site maintained by the authors of that
package, the largest instance of the traveling salesman problem solved exactly
as of January 2010 was a tour through 85,900 points in a VLSI application. It
significantly ex-ceeded the previous record of the shortest tour through all
24,978 cities in Sweden. There should be little doubt that the latest record
will also be eventually super-seded and our ability to solve ever larger
instances exactly will continue to expand. This remarkable progress does not
eliminate the usefulness of approximation al-gorithms for such problems,
however. First, some applications lead to instances that are still too large to
be solved exactly in a reasonable amount of time. Second, one may well prefer
spending seconds to find a tour that is within a few percent of optimum than to
spend many hours or even days of computing time to find the shortest tour
exactly.
But how can one tell how good
or bad the approximate solution is if we do not know the length of an optimal
tour? A convenient way to overcome this difficulty is to solve the linear
programming problem describing the instance in question by ignoring the
integrality constraints. This provides a lower bound—called the Held-Karp
bound—on the length of the shortest tour. The Held-Karp bound is
typically very close (less than 1%) to the length of an optimal tour,
and this bound can be computed in seconds or minutes unless the instance is
truly huge. Thus, for a tour
sa obtained by some heuristic, we estimate the
accuracy ratio r(sa) = f (sa)/f (s∗) from above
by the ratio f
(sa)/H K(s∗), where f (sa) is the length of the heuristic tour sa and H K(s∗) is the Held-Karp lower bound on the
shortest-tour length.
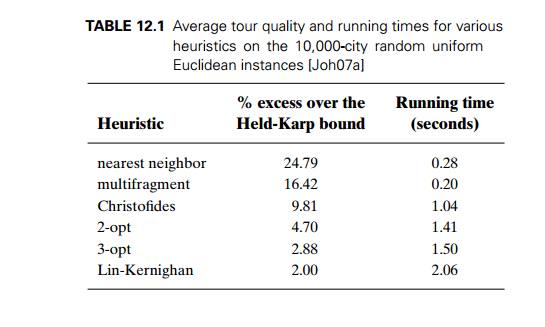
The results (see Table 12.1) from a large empirical study [Joh07a] indicate the average tour quality and running times for the discussed heuristics.3 The instances in the reported sample have 10,000 cities generated randomly and uniformly as integral-coordinate points in the plane, with the Euclidean distances rounded to the nearest integer. The quality of tours generated by the heuristics remain about the same for much larger instances (up to a million cities) as long as they belong to the same type of instances. The running times quoted are for expert implementations run on a Compaq ES40 with 500 Mhz Alpha processors and 2 gigabytes of main memory or its equivalents.
Asymmetric instances of the traveling salesman problem—i.e., those with a nonsymmetic matrix of intercity distances—have proved to be significantly harder to solve, both exactly and approximately, than Euclidean instances. In partic-ular, exact optimal solutions for many 316-city asymmetric instances remained unknown at the time of the state-of-the-art survey by Johnson et al. [Joh07b].
Related Topics