Chapter: Introduction to the Design and Analysis of Algorithms : Space and Time Trade-Offs
B-Trees Algorithms
B-Trees
The idea of using extra space
to facilitate faster access to a given data set is partic-ularly important if
the data set in question contains a very large number of records that need to
be stored on a disk. A principal device in organizing such data sets is an index,
which provides some information about the location of records with indicated
key values. For data sets of structured records (as opposed to ŌĆ£unstruc-turedŌĆØ
data such as text, images, sound, and video), the most important index
organization is the B-tree, introduced by R. Bayer and E. McGreight [Bay72]. It
extends the idea of the 2-3 tree (see Section 6.3) by permitting more than a
single key in the same node of a search tree.
In the B-tree version we consider here, all data records (or record keys) are stored at the leaves, in increasing order of the keys. The parental nodes are used for indexing. Specifically, each parental node contains n ŌłÆ 1 ordered keys K1 < . . . < KnŌłÆ1 assumed, for the sake of simplicity, to be distinct. The keys are interposed with n pointers to the nodeŌĆÖs children so that all the keys in subtree T0 are smaller than K1, all the keys in subtree T1 are greater than or equal to K1 and smaller than K2 with K1 being equal to the smallest key in T1, and so on, through the last subtree TnŌłÆ1 whose keys are greater than or equal to KnŌłÆ1 with KnŌłÆ1 being equal to the smallest key in TnŌłÆ1 (see Figure 7.7).
In addition, a B-tree of
order m Ōēź 2 must satisfy the following structural
properties:
The root is either a leaf or
has between 2 and m children.
Each node, except for the
root and the leaves, has between m/2 and m children (and hence between m/2 ŌłÆ 1 and m ŌłÆ 1 keys).
The tree is (perfectly)
balanced, i.e., all its leaves are at the same level.
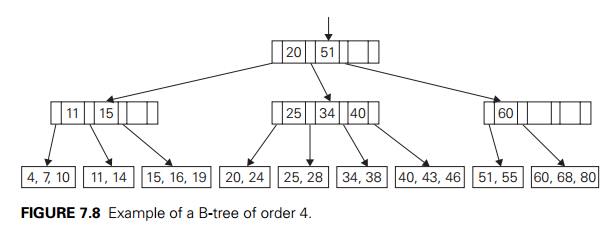
An example of a B-tree of
order 4 is given in Figure 7.8.
Searching in a B-tree is very
similar to searching in the binary search tree, and even more so in the 2-3
tree. Starting with the root, we follow a chain of pointers to the leaf that
may contain the search key. Then we search for the search key among the keys of
that leaf. Note that since keys are stored in sorted order, at both parental
nodes and leaves, we can use binary search if the number of keys at a node is
large enough to make it worthwhile.
It is not the number of key
comparisons, however, that we should be con-cerned about in a typical
application of this data structure. When used for storing a large data file on
a disk, the nodes of a B-tree normally correspond to the disk pages. Since the
time needed to access a disk page is typically several orders of magnitude
larger than the time needed to compare keys in the fast computer mem-ory, it is
the number of disk accesses that becomes the principal indicator of the
efficiency of this and similar data structures.
How many nodes of a B-tree do
we need to access during a search for a record with a given key value? This
number is, obviously, equal to the height of the tree plus 1. To estimate the
height, let us find the smallest number of keys a B-tree of order m and positive height h can have. The root of the tree will contain at
least one key. Level 1 will have at least two nodes with at least m/2 ŌłÆ 1 keys in each of them, for the total minimum
number of keys 2(
m/2 ŌłÆ 1). Level 2 will have at least 2 m/2 nodes (the children of the nodes on level 1)
with at least m/2 ŌłÆ 1 in each of them, for the total minimum
number of keys 2 m/2 ( m/2 ŌłÆ 1). In general, the nodes of level
i, 1 Ōēż i Ōēż h ŌłÆ 1, will contain at least 2 m/2 iŌłÆ1( m/2 ŌłÆ 1) keys. Finally, level h, the leaf level, will have at least 2 m/2 hŌłÆ1 nodes with at least one key in each. Thus, for
any B-tree of order m with n nodes and height h > 0, we have the following inequality:

After a series of standard
simplifications (see Problem 2 in this sectionŌĆÖs exercises), this inequality
reduces to
which, in turn, yields the
following upper bound on the height h of the B-tree of order m with n nodes:

Inequality (7.7) immediately
implies that searching in a B-tree is a O(log n) operation. But it is
important to ascertain here not just the efficiency class but the actual number
of disk accesses implied by this formula. The following table contains the
values of the right-hand-side estimates for a file of 100 million records and a
few typical values of the treeŌĆÖs order m:
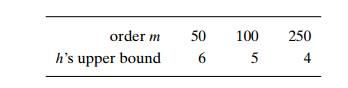
Keep in mind that the tableŌĆÖs
entries are upper estimates for the number of disk accesses. In actual
applications, this number rarely exceeds 3, with the B-treeŌĆÖs root and
sometimes first-level nodes stored in the fast memory to minimize the number of
disk accesses.
The operations of insertion
and deletion are less straightforward than search-ing, but both can also be
done in O(log n) time. Here we outline an insertion algorithm
only; a deletion algorithm can be found in the references (e.g., [Aho83],
[Cor09]).
The most straightforward
algorithm for inserting a new record into a B-tree is quite similar to the
algorithm for insertion into a 2-3 tree outlined in Section 6.3. First, we
apply the search procedure to the new recordŌĆÖs key K to find the appropriate leaf for the new
record. If there is room for the record in that leaf, we place it there (in an
appropriate position so that the keys remain sorted) and we are done. If there
is no room for the record, the leaf is split in half by sending the second half
of the records to a new node. After that, the smallest key K in the new node and the pointer to it are
inserted into the old leafŌĆÖs parent (immediately after the key
and pointer to the old leaf). This recursive procedure may percolate up to the
treeŌĆÖs root. If the root is already full too, a new root is created with the
two halves of the old rootŌĆÖs keys split between two children of the new root.
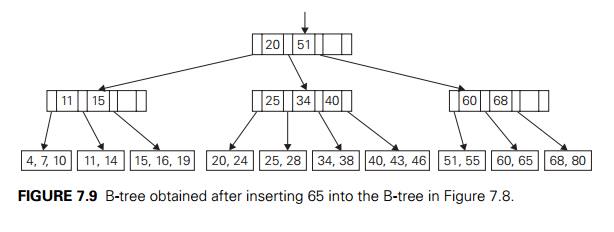
As an example, Figure 7.9 shows the result of inserting 65 into the B-tree in
Figure 7.8 under the restriction that the leaves cannot contain more than three
items.
You should be aware that there
are other algorithms for implementing inser-tions into a B-tree. For example,
to avoid the possibility of recursive node splits, we can split full nodes
encountered in searching for an appropriate leaf for the new record. Another
possibility is to avoid some node splits by moving a key to the nodeŌĆÖs sibling.
For example, inserting 65 into the B-tree in Figure 7.8 can be done by moving
60, the smallest key of the full leaf, to its sibling with keys 51 and 55, and
replacing the key value of their parent by 65, the new smallest value in
the second child. This
modification tends to save some space at the expense of a slightly more
complicated algorithm.
A B-tree does not have to be
always associated with the indexing of a large file, and it can be considered
as one of several search tree varieties. As with other types of search
treesŌĆösuch as binary search trees, AVL trees, and 2-3 treesŌĆöa B-tree can be
constructed by successive insertions of data records into the initially empty
tree. (The empty tree is considered to be a B-tree, too.) When all keys reside
in the leaves and the upper levels are organized as a B-tree comprising an
index, the entire structure is usually called, in fact, a B+-tree.
Exercises 7.4
Give examples of using an index in real-life applications that do
not involve computers.
a. Prove the equality

which was used in the
derivation of upper bound (7.7) for the height of a B-tree.
Complete the derivation of inequality (7.7).
Find the minimum order of the B-tree that guarantees that the
number of disk accesses in searching in a file of 100 million records does not
exceed 3. Assume that the rootŌĆÖs page is stored in main memory.
Draw the B-tree obtained after inserting 30 and then 31 in the
B-tree in Figure 7.8. Assume that a leaf cannot contain more than three items.
Outline an algorithm for finding the largest key in a B-tree.
a. A top-down 2-3-4 tree is a B-tree of order 4 with the following
modifica-tion of the insert
operation: Whenever a search for a leaf for a new key
encounters a full node (i.e.,
a node with three keys), the node is split into two nodes by sending its middle
key to the nodeŌĆÖs parent, or, if the full node happens to be the root, the new
root for the middle key is created. Construct a top-down 2-3-4 tree by
inserting the following list of keys in the initially empty tree:
10, 6, 15, 31, 20, 27, 50, 44, 18.
What is the principal advantage of this insertion procedure
compared with the one used for 2-3 trees in Section 6.3? What is its
disadvantage?
a. Write a program implementing a key insertion
algorithm in a B-tree.
Write a program for visualization of a key insertion algorithm in a
B-tree.
SUMMARY
Space and time trade-offs in
algorithm design are a well-known issue for both theoreticians and
practitioners of computing. As an algorithm design technique, trading space for
time is much more prevalent than trading time for space.
Input enhancement is one of the two principal varieties of
trading space for time in algorithm
design. Its idea is to preprocess the problemŌĆÖs input, in whole or in part, and
store the additional information obtained in order to accelerate solving the
problem afterward. Sorting by distribution counting and several important
algorithms for string matching are examples of algorithms based on this
technique.
Distribution counting is a special method for sorting lists of
elements from a small set of possible
values.
HorspoolŌĆÖs algorithm for string matching can be considered a
simplified version of the Boyer-Moore algorithm. Both algorithms
are based on the ideas of input enhancement and right-to-left comparisons of a
patternŌĆÖs characters. Both algorithms use the same bad-symbol shift table; the Boyer-Moore also uses a second table,
called the good-suffix shift table.
PrestructuringŌĆöthe second type of technique that exploits space-for-time trade-offsŌĆöuses extra space to
facilitate a faster and/or more flexible access to the data. Hashing and B+-trees are important examples of
prestructuring.
Hashing is a very efficient approach to implementing dictionaries. It is
based on the idea of mapping keys
into a one-dimensional table. The size limitations of such a table make it
necessary to employ a collision
resolution mechanism. The two principal varieties of hashing are open hashing or separate chaining (with keys stored in linked lists outside of the
hash table) and closed hashing
or open addressing (with keys stored inside the table). Both enable searching, insertion, and
deletion in (1) time, on average.
Related Topics