Chapter: Mechanical : Computer Aided Design : Visual Realism
Visual Realism
Visual
Realism
Introduction
Visual Realism is a method for
interpreting picture data fed into a computer and for creating pictures from
difficult multidimensional data sets. Visualization can be classified as :
┬Ę Visualization
in geometric modeling
┬Ę Visualization
in scientific computing.
Visualization in geometric modeling is
helpful in finding connection in the design applications. By shading the parts
with various shadows, colors and transparency, the designer can recognize
undesired unknown interferences. In the design of complex surfaces shading with
different texture characteristics can use to find any undesired quick
modifications in surface changes.
Visualization in computing is viewed as
a technique of geometric modeling. It changes the data in numerical form into
picture display, allowing users to view their simulations and computations.
Visualization offers a process of seeing the hidden. Visualization in
scientific computing is of great interest to engineers during the design
process.
Existing
visualization methods are:
┬Ę Parallel
projections
┬Ę Perspective
projection.
┬Ę Hidden
line removal
┬Ę Hidden
surface removal
┬Ę Hidden
solid removal
┬Ę Shaded
models
Hidden line and surface
removal methods remove the uncertainty of the displays of 3D models and is
accepted the first step towards visual realism. Shaded images can only be
created for surface and solid models. In multiple step shading process, the
first step is removing the hidden surfaces / solids and second step is shades
the visible area only. Shaded images provide the maximum level of
visualization.
The processes of hidden
removal need huge amounts of computing times and also upper end hardware
services. The creation and maintenance of such a models are become complex.
Hence, creating real time images needs higher end computers with the shading
algorithms embedded into the hardware.
Hidden line removal
Hidden
line removal (HLR) is the method of computing which edges are not hidden by the
faces of parts for a specified view and the display of parts in the projection
of a model into a 2D plane. Hidden line removal is utilized by a CAD to display
the visual lines. It is considered that information openly exists to define a
2D wireframe model as well as the 3D topological information. Typically, the
best algorithm is required for viewing this information from an available part
representation.
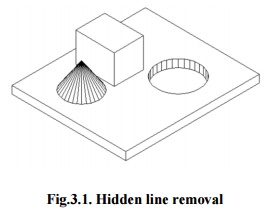
Fig.3.1.
Hidden line removal
3D parts are simply
manufactured and frequently happen in a CAD design of such a part. In addition,
the degrees of freedom are adequate to show the majority of models and are not
overwhelming in the number of constraints to be forced. Also, almost all the
surface-surface intersections and shadow computations can be calculated
analytically which results in significant savings in the number of computations
over numerical methods.
Priority
algorithm is basis on organization all the polygons in the view according to
the biggest Z-coordinate value of each. If a face intersects more than one
face, other visibility tests besides the Z-depth required to solve any issue.
This step comprises purposes of wrapper.
Imagines
that objects are modeled with lines and lines are generated where surfaces
join. If only the visible surfaces are created then the invisible lines are
automatically removed.
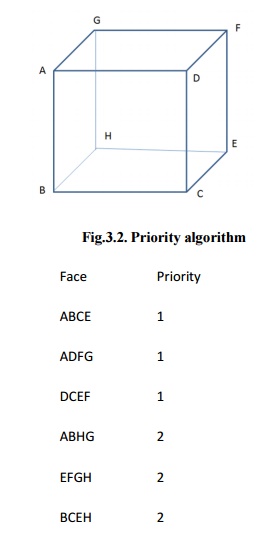
Fig.3.2. Priority algorithm
Face Priority
ABCE
1
ADFG 1
DCEF 1
ABHG 2
EFGH 2
BCEH 2
ABCD, ADFG, DCEF are given higher
priority-1. Hence, all lines in this faces are visible, that is, AB, BC, CD,
DA, AD, DF, FG, AG, DC, CE, EF and DF are visible.
AGHB, EFGH, BCEH are given lower
priority-2. Hence, all lines in this faces other than priority-1 are invisible,
that is BH, EH and GH. These lines must be eliminated.
Hidden surface removal
The hidden surface
removal is the procedure used to find which surfaces are not visible from a
certain view. A hidden surface removal algorithm is a solution to the
visibility issue, which was one of the first key issues in the field of three
dimensional graphics. The procedure of hidden surface identification is called
as hiding, and such an algorithm is called a ŌĆśhiderŌĆÖ.Hidden surface
identification is essential to render a 3D image properly, so that one cannot
see through walls in virtual reality.
Hidden surface
identification is a method by which surfaces which should not be visible to the
user are prohibited from being rendered. In spite of benefits in hardware
potential there is still a requirement for difficult rendering algorithms. The
accountability of a rendering engine is to permit for bigger world spaces and
as the worldŌĆÖssize approaches infinity the rendering engine should not slow
down but maintain at constant speed.
There are many methods
for hidden surface identification. They are basically a work out in sorting,
and generally vary in the order in which the sort is executed and how the
problem is subdivided. Sorting more values of graphics primitives is generally
done by divide.
1. Z - buffer algorithm
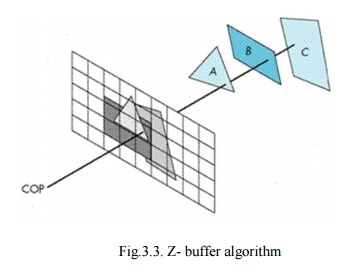
Fig.3.3.
Z- buffer algorithm
In Z-buffering, the
depth of ŌĆśZŌĆÖvalue is verified against available depth value. If the present
pixel is behind the pixel in the Z-buffer, the pixel is eliminated, or else it
is shaded and its depth value changes the one in the Z-buffer. Z-buffering
helps dynamic visuals easily, and is presently introduced effectively in
graphics hardware.
┬Ę
Depth buffering is one of the easiest
hidden surface algorithms
┬Ę
It keeps follow of the space to nearest
object at every pixel position.
┬Ę Initialized
to most negative z value.
┬Ę
when image being drawn, if its z
coordinate at a position is higher than z buffer value, it is drawn, and new z
coordinate value is stored; or else, it is not drawn
┬Ę
If a line in three dimensional is being
drawn, then the middle z values are interpolated: linear interpolation for
polygons, and can calculate z for more difficult surfaces.
Algorithm: loop
on y;
loop
on x;
zbuf[x,y]
= infinity;
loop
on objects
{
loop
on y within y range of this object
{
loop
on x within x range of this scan line of this object
{
if z(x,y) < zbuf[x,y] compute z of
this object at this pixel & test zbuf[x,y] = z(x,y) update z-buffer
image[x,y]
= shade(x,y) update image (typically RGB)
}
}
}
Basic
operations:
1. compute
y range of an object
2. compute
x range of a given scan line of an object
3. Calculate
intersection point of a object with ray through pixel position (x,y).
2.PainterŌĆÖsalgorithm
The
painter's algorithm is called as a priority fill, is one of the easiest results
to the visibility issue in three dimensional graphics. When projecting a 3D
view onto a 2D screen, it is essential at various points to be finalized which
polygons are visible, and which polygons are hidden.
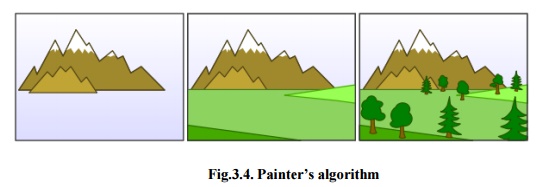
Fig.3.4.
PainterŌĆÖsalgorithm
The ŌĆśpainter's
algorithmŌĆÖshows to the method employed by most of the painters of painting
remote parts of a scene before parts which are close thereby hiding some areas
of distant parts. The painter's algorithm arranges all the polygons in a view
by their depth and then paints them in this order, extreme to closest. It will
paint over the existing parts that are usually not visible hence solving the
visibility issue at the cost of having painted invisible areas of distant
objects. The ordering used by the algorithm is referred a 'depth order', and
does not have to respect the distances to the parts of the scene: the important
characteristics of this ordering is, somewhat, that if one object has ambiguous
part of another then the first object is painted after the object that it is
ambiguous. Thus, a suitable ordering can be explained as a topological ordering
of a directed acyclic graph showing between objects.
Algorithm:
sort objects by depth, splitting if
necessary to handle intersections; loop on objects (drawing from back to front)
{
loop
on y within y range of this object
{
loop
on x within x range of this scan line of this object
{
image[x,y]
= shade(x,y);
}
}
}
Basic operations:
1. compute
ŌĆśyŌĆÖrange of an object
2. compute
ŌĆśxŌĆÖrange of a given scan line of an object
3. compute
intersection point of a given object
with ray via pixel point (x,y).
4. evaluate
depth of two objects, determine if A is in front of B, or B is in front of A,
if they donŌĆÖt overlap in xy, or if they intersect
5. divide
one object by another object
Advantage
of painter's algorithm is the inner loops are quite easy and limitation is
sorting
operation.
3. Warnock algorithm
The Warnock algorithm
is a hidden surface algorithm developed by John Warnock that is classically
used in the area of graphics. It explains the issues of rendering a difficult
image by recursive subdivision of a view until regions are attained that is trivial
to evaluate. Similarly, if the view is simple to compute effectively then it is
rendered; else it is split into tiny parts which are likewise evaluated for
simplicity. This is a algorithm with run-time of O(np), where p is the
number of pixels in the viewport and n is the number of polygons.
The
inputs for Warnock algorithm are detail of polygons and a viewport. The good
case is that if the detail of polygons is very simple then creates the polygons
in the viewport. The continuous step is to divide the viewport into four
equally sized quadrants and to recursively identify the algorithm for each
quadrant, with a polygon list changed such that it contains polygons that are
detectable in that quadrant.
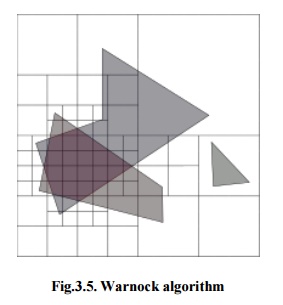
Fig.3.5.
Warnock algorithm
1. Initialize
the region.
2. Generate
list of polygons by sorting them with their z values.
3. Remove
polygons which are outside the area.
4. Identify
relationship of each polygon.
5. Execute
visibility decision analysis:
a)Fill
area with background color if all polygons are disjoint,
b)Fill
entire area with background color and fill part of polygon contained in area
with color of polygon if there is only one contained polygon,
c) If
there is a single surrounding polygon but not contained then fill area with
color of surrounding polygon.
d)Set
pixel to the color of polygon which is closer to view if region of the pixel
(x,y) and if neither of (a) to (d) applies calculate z- coordinate at pixel
(x,y) of polygons.
6. If
none of above is correct then subdivide the area and Go to Step 2.
Hidden
Solid Removal
The hidden solid removal issue involves
the view of solid models with hidden line or surface eliminated. Available
hidden line algorithm and hidden surface algorithms are useable to hidden solid
elimination of B-rep models.
The
following techniques to display CSG models:
1. Transfer
the CSG model into a boundary model.
2. Use
a spatial subdivision strategy.
3. Based
on ray sorting.
1.Ray-Tracing algorithm
A ray tracing is a method for creating an image by tracing the path of light via pixels in an image plane and reproducing the effects of its meets with virtual objects. The procedure is capable of creating a high degree of visual realism, generally higher than that of usual scan line techniques, but at a better computational. This creates ray tracing excellent suited for uses where the image can be rendered gradually ahead of time, similar to still images and film and TV visual effects, and more badly suited for real time environment like video games where speed is very important. Ray tracing is simulating a wide range of optical effects, such as scattering, reflection and refraction.
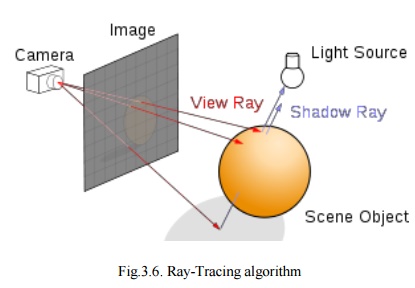
Fig.3.6. Ray-Tracing algorithm
Ray-Tracing
algorithm
For every pixel in image
{
Generate ray from eye point passing via
this pixel Initialize Nearest ŌĆśTŌĆÖto ŌĆśINFINITYŌĆÖ
Initialize
Nearest Object to NULL
For
each object in scene
{
If
ray intersects this image
{
If
t of intersection is less than Nearest T
{
Set
Nearest T to t of the intersection
Set
Nearest image to this object
}
}
}
If
Nearest image is NULL
{
Paint
this pixel with background color
}
Else
{
Shoot
a ray to every light source to check if in shadow
If
surface is reflective, generate reflection ray
If
transparent, generate refraction ray
Apply
Nearest Object and Nearest T to execute shading function
Paint
this pixel with color result of shading function
}
}
Optical ray tracing
explains a technique for creating visual images constructed in three
dimensional graphics environments, with higher photorealism than either ray
casting rendering practices. It executes by tracing a path from an imaginary
eye via every pixel in a virtual display, and computing the color of the object
visible via it.
Displays in ray tracing
are explained mathematically by a programmer. Displays may also incorporate
data from 3D models and images captured like a digital photography.
In general, every ray
must be tested for intersection with a few subsets of all the objects in the
view. Once the nearest object has been selected, the algorithm will calculate
the receiving light at the point of intersection, study the material properties
of the object, and join this information to compute the finishing color of the
pixel. One of the major limitations of algorithm, the reflective or translucent
materials may need additional rays to be re-cast into the scene.
Advantages of Ray tracing:
1. A
realistic simulation of lighting over other rendering.
2. An
effect such as reflections and shadows is easy and effective.
3. Simple
to implement yet yielding impressive visual results.
Limitation of ray tracing:
Scan line algorithms
use data consistency to divide computations between pixels, while ray tracing
normally begins the process a new, treating every eye ray separately.
Shading
Shading defines to
describe depth perception in three dimensioning models by different levels of
darkness. Shading is applied in drawing for describes levels of darkness on
paper by adding media heavy densely shade for darker regions, and less densely
for lighter regions.
There
are different techniques of shading with cross hatching where perpendicular
lines of changing closeness are drawn in a grid pattern to shade an object. The
closer the lines are combining, the darker the area appears. Similarly, the
farther apart the lines are, the lighter the area shows.
Fig.3.7. Shading
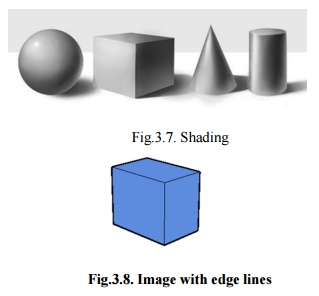
Fig.3.8.
Image with edge lines
The
image shown in figure 3.8 has the faces of the box rendered, but all in the
similar color. Edge lines have been rendered here as well which creates the
image easier to view.
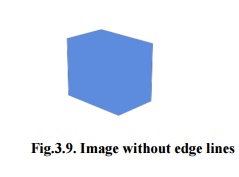
Fig.3.9.
Image without edge lines
The
image shown in figure 3.9 is the same model rendered without edge lines. It is
complicated to advise where one face of the box ends and the next starts.

Fig.3.10.
Image with Shading
The image shown in
figure 3.10 has shading enabled which makes the image extra realistic and makes
it easier to view which face is which.
Shading techniques:
In
computer graphics, shading submits to the procedure of changing the color of an
object in the 3D view, a photorealistic effect to be based on its angle to
lights and its distance from lights. Shading is performed through the rendering
procedure by a program called a ŌĆśShaderŌĆÖ. Flat shading and Smooth shading are
the two major techniques using in Computer graphics.
Related Topics