Chapter: Operations Research: An Introduction : Classical Optimization Theory
Unconstrained Problems -Classical Optimization Theory
UNCONSTRAINED PROBLEMS
An
extreme point of a function f(X)
defines either a maximum or a minimum of the
Figure
18.1 illustrates the maxima and minima of a single-variable function f(x) over the interval [a,b]. The points x1, x2, x3, x4, and x6 are all extrema of f(x), with xl, x3, and x6 as maxima and x2
and x4 as minima. Because

f(x6) is a global or absolute
maximum, and f(x1) and f(x3) are local or relative maxima. Similarly,f(x4) is a local minimum and f(x2) is a global minimum.
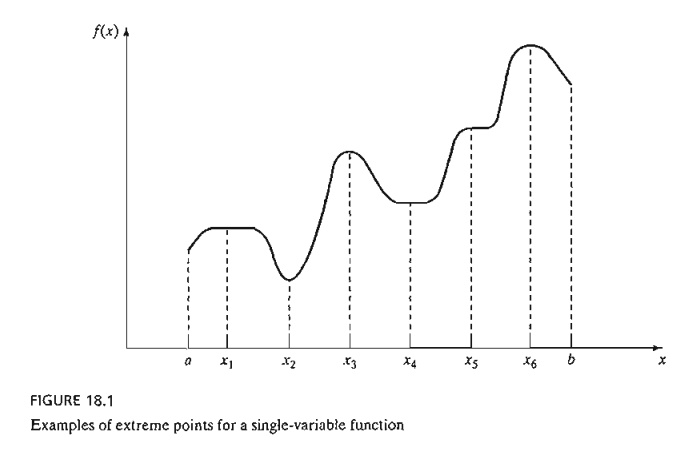
Although x1
(in Figure 18.1) is a maximum point, it differs from remaining local maxima in
that the value of f corresponding to at least one
point in the neighborhood of x1 equals f(x1) In this
respect, x1 is a weak maximum,
whereas x3 and x6 are strong maxima. In general, for h
as defined earlier, X o
is a weak maximum if f(X o + h) ≤ f(X 0) and a strong maximum if f(X o + h) < f(X o).
In Figure
18.1, the first derivative (slope) of f equals zero at all extrema. However,
this property is also satisfied at inflection
and saddle points, such as x5. If a point with zero slope
(gradient) is not an extremum (maximum or minimum), then it must be an
inflection or a saddle point.
1. Necessary and Sufficient
Conditions
This
section develops the necessary and sufficient conditions for an n-variable
function f(X) to have extrema. It is assumed that the first and
second partial derivatives of f(X) are continuous for all X.
We show
by contradiction that Ñf(X o) must vanish at a minimum
point Xo. For suppose it does not, then for a specific j the
following condition will hold.
This
result contradicts the assumption that X o is a minimum point. Thus,
Ñf(X o) must equal zero. A similar
proof can be established for the maximization case.
Because
the necessary condition is also satisfied for inflection and saddle points, it
is more appropriate to refer to the points obtained from the solution of Ñf(Xo) = 0 as stationary points. The next theorem establishes the sufficiency
conditions for X o to be an extreme point.
Theorem 18.1-2. A sufficient condition for a
stationary point X o to be an extremum is that the Hessian matrix H evaluated at X o satisfy the following conditions:
i.
H is positive definite if Xois a minimum
point.
ii.
H is negative definite I fXo is a maximum
point.
Proof. By Taylor's theorem, for 0 < q < 1,
Given that
the second partial derivative is continuous, the expression ½ hTHh
must have the same sign at both Xo and Xo + qh. Because hTHhl Xo defines a quadratic form (see
Section 0.3 on the CD), this expression (and hence hTXh|Xo+qh) is
positive if and only if, H|x0
is
positive-definite. This means that a sufficient condition for the stationary point X o to be a minimum is that the
Hessian matrix, H, evaluated at the same point is positive-definite. A similar
proof for the maximization case shows that the corresponding Hessian matrix
must be negative-definite.
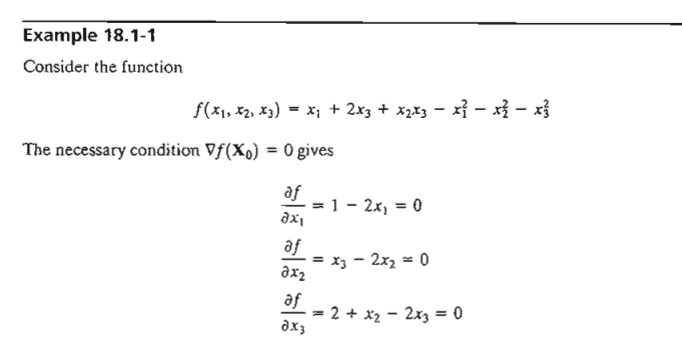
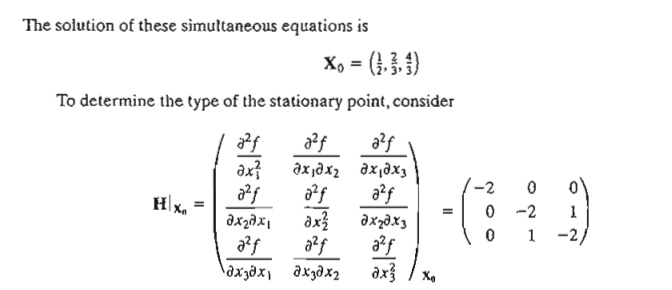
The
principal minor determinants of H|xo have the
values -2,4, and -6, respectively. Thus, as shown in Section D.3, HIXu is
negative-definite and Xo = (1/2,
2/3, 4/3)
represents a maximum point.
In general,
if H|x0 is indefinite, Xo must be
a saddle point. For nonconclusive cases, Xo mayor may not be an
extremum and the sufficiency condition becomes rather involved, because
higher-order terms in Taylor's expansion must be considered.
The
sufficiency condition established by Theorem 18.1-2 applies to single-variable
functions as follows. Given that yo
is a stationary point, then
i.
yo is a
maximum if f” (yo) < 0.
ii.
yo is a
minimum if f" (yo) > 0.
If f” (y0) = 0, higher-order derivatives must
be investigated as the following theorem
requires.
Theorem 18.1-3. Given yo, a
stationary point of f(y), if the
first (n - 1) derivatives are zero and f(n)(yo)
!= 0, then
i.
If n is
odd, yo is an inflection point.
ii.
If n is
even then yo is a minimum if f(n)(yo) > 0 and a maximum if f(n)(yo) < 0.
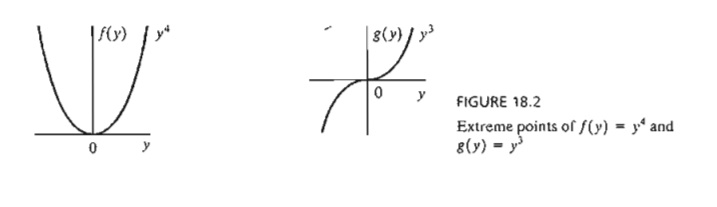
Example 18.1-2
Figure
18.2 graphs the following two functions:
3. Verify
that the function

has the
stationary points (0, 3, 1), (0, 1, -1), (1,2,0),
(2, 1, 1), and (2, 3, -1). Use the sufficiency condition to identify the
extreme points.
*4. Solve
the following simultaneous equations by converting the system to a nonlinear
objective function with no constraints.
5. Prove
Theorem 18.1-3.
2. The Newton-Raphson Method
In
general, the necessary condition equations, Ñ f(X) = 0, may be
difficult to solve numerically. The Newton-Raphson method is an iterative
procedure for solving simultaneous nonlinear equations.
Consider
the simultaneous equations
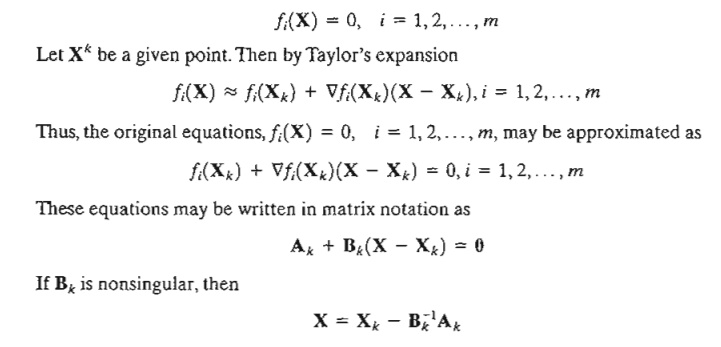
The idea
of the method is to start from an initial point X o and then use the
equation above to determine a new point. The process continues until two
successive points, X k and X k +1 are
approximately equal.
A
geometric interpretation of the method is illustrated by a single-variable function
in Figure 18.3. The relationship between xk
and xk+1 for a
single-variable function f(x) reduces
to
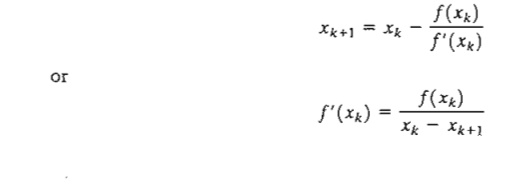
FIGURE 18.3
Illustration of the iterative process in the Newton-Raphson method
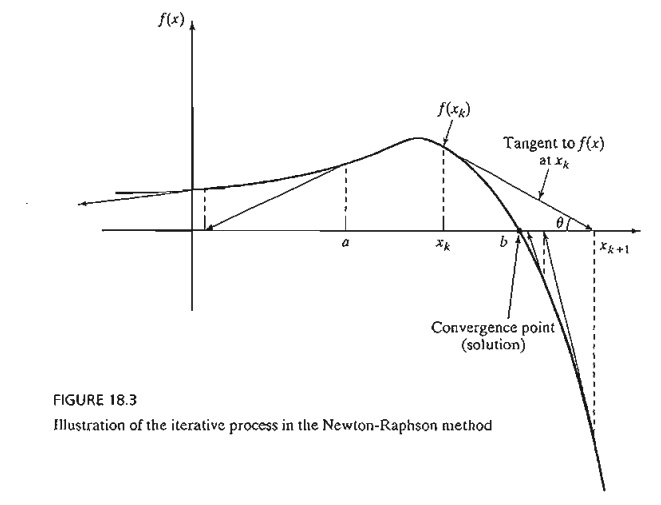
The
figure shows that xk+1 is
determined from the slope of f(x) at xk where
tan q = f' (xk).
One
difficulty with the method is that convergence is not always guaranteed unless
the function f is well behaved. In
Figure 18.3, if the initial point is a,
the method will diverge. In general, trial and error is used to locate a
"good" initial point.
Example
18.1-3
To
demonstrate the use of the Newton-Raphson method, consider determining the
stationary points of the function

To
determine the stationary points, we need to solve
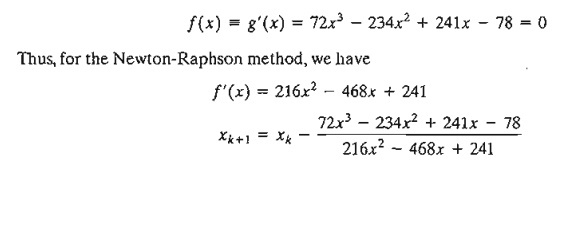
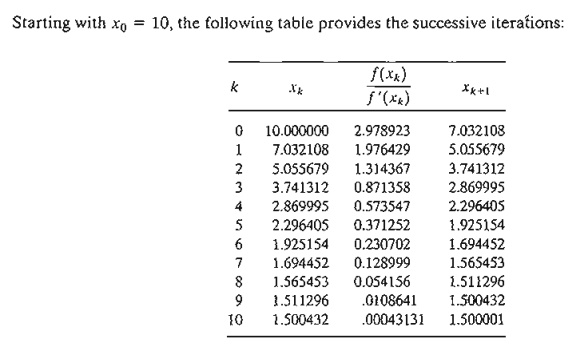
The
method converges to x = 1.5.
Actually, f(x) has three stationary
points at x = 2/3, x = 13/12, and x = 3/2. The remaining
two points can be found by selecting
different values for initial xo. In fact,
xo = .5 and xo = 1 should yield the missing
stationary points.
Excel
Moment
Template
excelNR.xls can be used to solve any single-variable equation. It requires entering f(x)/f' (x) in cell C3. For Example 18.1-3, we enter

The
variable x is replaced with A3. The
template allows setting a tolerance limit Δ, which specifies the allowable difference between xk and xk+1 that signals the termination of the iterations. You
are encouraged to use different initial xo to get a feel of how the method
works.
In
general, the Newton-Raphson method requires making several attempts before
"all" the solutions can be found. In Example 18.1-3, we know
beforehand that the equa-tion has three roots. This will not be the case with
complex or multi-variable functions, however.
PROBLEM SET
18.1B
1. Use
NewtonRaphson.xls to solve Problem I(c), Set I8.la.
2. Solve
Problem 2(b), Set I8.la by the Newton-Raphson method.
Related Topics