Chapter: Civil : Mechanics Of Solids : Transverse Loading On Beams And Stresses In Beam
Torsion
Torsion
In solid mechanics, torsion
is the twisting of an object due to an applied torque. In sections
perpendicular to the torque ax is, the resultant shear stress in this section
is perpendicular to the radius.
For solid shafts of uniform circular
cross-section or hollow circular shaf ts with constant wall thickness, the
torsion relations are:
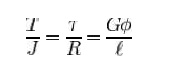
where:
�
R is the outer
radius of the shaft i.e. m, ft.
�
t is the maximum
shear stress at the outer surface.
�
f is the angle of twist in radians.
�
T is the torque (N�m or ft�lbf).
�
l is the length of the object the torque is
being applied to or over.
�
G is the shear modulus or more commonly the modulus
of rigidity and is usually given
in gigapascals (GPa), lb f/in2
(psi), or lbf/ft2.
�
J is the torsion constant for the
section. It is identical to the polar moment of inertia for a round
shaft or concentric tube only. For other shapes J must be determined by other
means. For solid shafts the membrane analogy is useful, and for thin walled
tubes of arbitrary shape the she ar flow approximation is fairly good, if t he
section is not re-entrant. For thick walle d tubes of arbitrary shape there is
no simp le solution, and finite element analysis (FEA) may be the best method.
�
The product GJ
is calle d the torsional rigidity.
Related Topics