Chapter: Fundamentals of Database Systems : Advanced Database Models, Systems, and Applications : Enhanced Data Models for Advanced Applications
Spatial Database Concepts
Spatial Database Concepts
1. Introduction to
Spatial Databases
Spatial
databases incorporate functionality that provides support for databases that
keep track of objects in a multidimensional space. For example, cartographic
data-bases that store maps include two-dimensional spatial descriptions of
their objects—from countries and states to rivers, cities, roads, seas, and so
on. The systems that manage geographic data and related applications are known
as Geographical Information Systems
(GIS), and they are used in areas such as environmental applications,
transportation systems, emergency response systems, and battle management.
Other databases, such as meteorological databases for weather information, are
three-dimensional, since temperatures and other meteorological information are
related to three-dimensional spatial points. In general, a spatial database stores
objects that have spatial characteristics that describe them and that have spatial relationships among them.
The spatial relationships among the objects are important, and they are often
needed when querying the database. Although a spatial database can in general
refer to an n-dimensional space for
any n, we will limit our discussion
to two dimensions as an illustration.
A spatial
database is optimized to store and query data related to objects in space,
including points, lines and polygons. Satellite images are a prominent example
of spatial data. Queries posed on these spatial data, where predicates for
selection deal with spatial parameters, are called spatial queries. For example, “What are the names of all bookstores
within five miles of the College of Computing building at Georgia Tech?” is a
spatial query. Whereas typical databases process numeric and character data,
additional functionality needs to be added for databases to process spatial
data types. A query such as “List all the customers located within twenty miles
of company headquarters” will require the processing of spatial data types
typically outside the scope of standard relational algebra and may involve
consult-ing an external geographic database that maps the company headquarters
and each customer to a 2-D map based on their address. Effectively, each
customer will be associated to a <latitude, longitude> position. A
traditional B+-tree index based on customers’ zip codes or other
nonspatial attributes cannot be used to process this query since traditional
indexes are not capable of ordering multidimensional coordinate data.
Therefore, there is a special need for databases tailored for handling spatial
data and spatial queries.
Table
26.1 shows the common analytical operations involved in processing geographic
or spatial data. Measurement operations
are used to measure some
Table 26.1 Common
Types of Analysis for Spatial Data
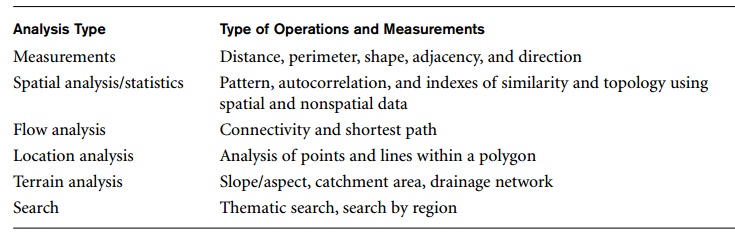
Analysis Type : Type of Operations and
Measurements
Measurements : Distance, perimeter, shape,
adjacency, and direction
Spatial analysis/statistics : Pattern,
autocorrelation, and indexes of similarity and topology using spatial and
nonspatial data
Flow analysis : Connectivity and shortest path
Location analysis : Analysis of points and lines
within a polygon
Terrain analysis : Slope/aspect, catchment area,
drainage network
Search : Thematic search, search by region
global
properties of single objects (such as the area, the relative size of an
object’s parts, compactness, or symmetry), and to measure the relative position
of different objects in terms of distance and direction. Spatial analysis operations, which often use statistical
techniques, are used to uncover spatial
relationships within and among mapped data layers. An example would be to
create a map—known as a prediction map—that
identifies the locations of likely customers for particular products based on the historical sales and demographic
information. Flow analysis
operations help in determining the shortest path between two points and also
the connectivity among nodes or regions in a graph. Location analysis aims to find if the given set of points and lines
lie within a given polygon (location). The process involves generating a buffer
around existing geographic features and then identifying or selecting features
based on whether they fall inside or outside the boundary of the buffer. Digital terrain analysis is used to
build three-dimensional models, where the topography of a geographical location
can be represented with an x, y, z
data model known as Digital Terrain (or Elevation) Model (DTM/DEM). The x and y dimensions of a DTM represent the horizontal plane, and z represents spot heights for the respective x,
y coordinates. Such models can be used
for analysis of environmental data or during the design of engineering projects
that require terrain information. Spatial search allows a user to search for
objects within a particular spatial region. For example, thematic search allows us to search for objects related to a
particular theme or class, such as “Find all water bodies within 25 miles of
Atlanta” where the class is water.
There are
also topological relationships among
spatial objects. These are often used in Boolean predicates to select objects
based on their spatial relationships. For example, if a city boundary is
represented as a polygon and freeways are represented as multilines, a
condition such as “Find all freeways that go through Arlington, Texas” would
involve an intersects operation, to
determine which freeways (lines) intersect the city boundary (polygon).
2. Spatial Data Types
and Models
This
section briefly describes the common data types and models for storing spatial
data. Spatial data comes in three basic forms. These forms have become a de facto standard due to their wide use
in commercial systems.
Map Data includes various geographic or
spatial features of objects in a map,
such as an object’s shape and the location of the object within the map. The
three basic types of features are points, lines, and polygons (or areas). Points are used to represent spatial
characteristics of objects whose locations
correspond to a single 2-d coordinate (x,
y, or longitude/latitude) in the
scale of a particular application. Depending on the scale, some examples of
point objects could be buildings, cellular towers, or stationary vehicles.
Moving vehicles and other moving objects can be represented by a sequence of
point locations that change over time. Lines
represent objects having length, such as roads or rivers, whose spatial
characteristics can be approximated by a sequence of connected lines. Polygons are used to represent spatial
characteristics of objects that have a boundary, such as countries, states,
lakes, or cities. Notice that some objects, such as buildings or cities, can be
represented as either points or polygons, depending on the scale of detail.
Attribute
data is the descriptive data that GIS systems associate with map features. For example, suppose
that a map contains features that represent
counties within a US state (such as Texas or Oregon). Attributes for each
county feature (object) could include population, largest city/town, area in
square miles, and so on. Other attribute data could be included for other features
in the map, such as states, cities, congressional districts, census tracts, and
so on.
Image
data includes data such as satellite images and aerial photographs, which are typically created by
cameras. Objects of interest, such as buildings and roads, can be identified
and overlaid on these images. Images can also be attributes of map features.
One can add images to other map features so that clicking on the feature would
display the image. Aerial and satellite images are typical examples of raster data.
Models of spatial information are
sometimes grouped into two broad categories: field and object. A spatial application (such as
remote sensing or highway traffic con-trol) is modeled using either a field- or
an object-based model, depending on the requirements and the traditional choice
of model for the application. Field
models are often used to model spatial data that is continuous in nature,
such as terrain ele-vation, temperature data, and soil variation
characteristics, whereas object models
have traditionally been used for applications such as transportation networks,
land parcels, buildings, and other objects that possess both spatial and
non-spatial attributes.
3. Spatial Operators
Spatial operators are used to capture all the relevant geometric
properties of objects embedded in the physical space and the relations between
them, as well as to perform spatial analysis. Operators are classified into
three broad categories.
Topological operators. Topological properties are invariant when topological transformations
are applied. These properties do not change after trans-formations like
rotation, translation, or scaling. Topological operators are hierarchically
structured in several levels, where the base level offers opera-tors the
ability to check for detailed topological relations between regions with a
broad boundary, and the higher levels offer more abstract operators that allow
users to query uncertain spatial data independent of the underlying geometric
data model. Examples include open (region), close (region), and inside (point,
loop).
Projective operators. Projective
operators, such as convex hull, are used to express predicates about the
concavity/convexity of objects as well as other spatial relations (for example,
being inside the concavity of a given object).
Metric operators. Metric operators provide a more
specific description of the object’s
geometry. They are used to measure some global properties of single objects
(such as the area, relative size of an object’s parts, compactness, and
symmetry), and to measure the relative position of different objects in terms
of distance and direction. Examples include length (arc) and distance (point,
point).
Dynamic Spatial Operators. The operations performed by the operators mentioned above are static,
in the sense that the operands are not affected by the application of the
operation. For example, calculating the length of the curve has no effect on
the curve itself. Dynamic operations
alter the objects upon which the operations act. The three fundamental dynamic
operations are create, destroy, and update. A representative example of dynamic operations would be
updating a spatial object that can be subdivided into translate (shift
position), rotate (change orientation), scale up or down, reflect (produce a
mirror image), and shear (deform).
Spatial Queries. Spatial queries are requests for spatial data that require the use of spatial operations. The following categories illustrate three typical
types of spatial queries:
Range query. Finds the objects of a particular
type that are within a given spatial
area or within a particular distance from a given location. (For exam-ple, find
all hospitals within the Metropolitan Atlanta city area, or find all ambulances
within five miles of an accident location.)
Nearest neighbor query. Finds an
object of a particular type that is closest to a given location. (For example, find the police car that is
closest to the location of crime.)
Spatial joins or overlays. Typically
joins the objects of two types based on some
spatial condition, such as the objects intersecting or overlapping spatially
or being within a certain distance of one another. (For example, find all
townships located on a major highway between two cities or find all homes that
are within two miles of a lake.)
4. Spatial Data
Indexing
A spatial
index is used to organize objects into a set of buckets (which correspond to
pages of secondary memory), so that objects in a particular spatial region can
be easily located. Each bucket has a bucket region, a part of space containing
all objects stored in the bucket. The bucket regions are usually rectangles;
for point data structures, these regions are disjoint and they partition the
space so that each point belongs to precisely one bucket. There are essentially
two ways of providing a spatial index.
Specialized indexing structures that allow
efficient search for data objects
based on
spatial search operations are included in the database system. These indexing
structures would play a similar role to that performed by B+-tree
indexes in traditional database systems. Examples of these indexing structures
are grid files and R-trees. Special types of spatial
indexes, known as spatial join indexes,
can be used to speed up spatial join operations.
Instead of creating brand new indexing structures,
the two-dimensional
(2-d)
spatial data is converted to single-dimensional (1-d) data, so that
traditional indexing techniques (B+-tree) can be used. The
algorithms for converting from 2-d to 1-d are known as space filling curves. We will not discuss these methods in detail
(see the Selected Bibliography for further references).
We give
an overview of some of the spatial indexing techniques next.
Grid Files. We introduced grid files for
indexing of data on multiple attributes
in
Chapter 18. They can also be used for indexing 2-dimensional and higher n-dimensional spatial data. The fixed-grid method divides an n-dimensional hyper-space into equal
size buckets. The data structure that implements the fixed grid is an n-dimensional array. The objects whose
spatial locations lie within a cell (totally or partially) can be stored in a dynamic structure to handle
overflows. This structure is useful for uniformly distributed data like
satellite imagery. However, the fixed-grid structure is rigid, and its
directory can be sparse and large.
R-Trees. The R-tree is a height-balanced tree, which
is an extension of the B+-tree
for k-dimensions, where k > 1. For two dimensions (2-d), spatial objects are approximated
in the R-tree by their minimum bounding
rectangle (MBR), which is the
smallest rectangle, with sides parallel to the coordinate system (x and y) axis, that contains the object. R-trees are characterized by the
following properties, which are similar to the properties for B+-trees
(see Section 18.3) but are adapted to 2-d spatial objects. As in Section 18.3,
we use M to indicate the maximum
number of entries that can fit in an R-tree node.
The structure of each index entry (or index record)
in a leaf node is (I, object-identifier),
where I is the MBR for the spatial object whose identifier is object-identifier.
Every node except the root node must be at least
half full. Thus, a leaf node that is not the root should contain m entries (I, object-identifier) where M/2
<= m <= M. Similarly, a non-leaf node that is not the root should contain m entries (I, child-pointer) where M/2
<= m <= M, and I is the MBR that contains the union of all the rectangles
in the node pointed at by child-pointer.
All leaf nodes are at the same level, and the root
node should have at least two pointers unless it is a leaf node.
All MBRs
have their sides parallel to the axes of the global coordinate system.
Other
spatial storage structures include quadtrees and their variations. Quadtrees generally divide each space
or subspace into equally sized areas, and proceed with the subdivisions of each
subspace to identify the positions of various objects. Recently, many newer
spatial access structures have been proposed, and this area remains an active
research area.
Spatial Join Index. A spatial
join index precomputes a spatial join operation and stores the pointers to the
related object in an index structure. Join indexes improve the performance of
recurring join queries over tables that have low update rates. Spatial join
conditions are used to answer queries such as “Create a list of highway-river
combinations that cross.” The spatial join is used to identify and retrieve
these pairs of objects that satisfy the cross
spatial relationship. Because computing the results of spatial relationships is
generally time consuming, the result can be com-puted once and stored in a
table that has the pairs of object identifiers (or tuple ids) that satisfy the
spatial relationship, which is essentially the join index.
A join
index can be described by a bipartite graph G = (V1,V2,E), where V1 contains
the tuple ids of relation R, and V2
contains the tuple ids of relation S.
Edge set contains an edge (vr,vs) for vr in R
and vs in S, if there is a tuple
corresponding to (vr,vs) in the join index. The bipartite graph models all of
the related tuples as connected vertices in the graphs. Spatial join indexes
are used in operations (see Section 26.3.3) that involve computation of
relationships among spatial objects.
5. Spatial Data Mining
Spatial
data tends to be highly correlated. For example, people with similar
characteristics, occupations, and backgrounds tend to cluster together in the
same neighborhoods.
The three
major spatial data mining techniques are spatial classification, spatial
association, and spatial clustering.
Spatial
classification. The goal of classification is to estimate the value
of an attribute of a relation based
on the value of the relation’s other attributes. An example of the spatial
classification problem is determining the locations of nests in a wetland based
on the value of other attributes (for example, vegetation durability and water
depth); it is also called the location
prediction problem. Similarly,
where to expect hotspots in crime activity is also a location prediction
problem.
Spatial
association. Spatial association rules are defined in terms of spatial predicates rather than items. A
spatial association rule is of the form
P1
^ P2 ^ ... ^ Pn
⇒ Q1 ^ Q2 ^ ... ^ Qm,
where at
least one of the Pi’s or Q
j’s is a spatial
predicate. For example, the rule
is_a(x, country) ^ touches(x, Mediterranean) ⇒ is_a (x,
wine-exporter)
(that is, a country that is adjacent to the Mediterranean Sea is typically a wine exporter) is an example of an association rule, which will have a certain support s and confidence c.
Spatial colocation rules attempt
to generalize association rules to point to collection data sets that are
indexed by space. There are several crucial differences between spatial and
nonspatial associations including:
The notion of a transaction is absent in spatial
situations, since data is embedded in continuous space. Partitioning space into
transactions would lead to an overestimate or an underestimate of interest
measures, for exam-ple, support or confidence.
Size of item sets in spatial databases is small,
that is, there are many fewer items in the item set in a spatial situation than
in a nonspatial situation.
In most
instances, spatial items are a discrete version of continuous variables. For
example, in the United States income regions may be defined as regions where
the mean yearly income is within certain ranges, such as, below $40,000, from
$40,000 to $100,000, and above $100,000.
Spatial
Clustering attempts to group database objects so that the most
similar objects are in the same cluster, and objects in different clusters are
as dis-similar as possible. One application of spatial clustering is to group
together seismic events in order to determine earthquake faults. An example of
a spatial clustering algorithm is density-based
clustering, which tries to find clusters based on the density of data
points in a region. These algorithms treat clusters as dense regions of objects
in the data space. Two variations of these algorithms are density-based spatial
clustering of applications with noise (DBSCAN) and density-based clustering
(DENCLUE). DBSCAN is a density-based clustering algorithm because it finds a
number of clusters starting from the estimated density distribution of
corresponding nodes.
6. Applications of
Spatial Data
Spatial data management is useful in many disciplines, including
geography, remote sensing, urban planning, and natural resource management.
Spatial database management is playing an important role in the solution of
challenging scientific problems such as global climate change and genomics.
Due to the spatial nature of genome data, GIS and spatial database management
systems have a large role to play in the area of bioinformatics. Some of the
typical applications include pattern recognition (for example, to check if the
topology of a particular gene in the genome is found in any other sequence
feature map in the database), genome browser development, and visualization
maps. Another important application area of spatial data mining is the spatial
outlier detection. A spatial outlier
is a spatially referenced object whose nonspatial attribute values are
significantly different from those of other spatially referenced objects in its
spatial neighborhood. For example, if a neighborhood of older houses has just
one brand-new house, that house would be an outlier based on the nonspatial
attribute ‘house_age’. Detecting spatial outliers is useful in many applications
of geographic information systems and spatial data-bases. These application
domains include transportation, ecology, public safety, public health,
climatology, and location-based services.
Related Topics