Chapter: Mechanical : Dynamics of Machines : Single Degree Free Vibration
Single Degree Free Vibration
SINGLE DEGREE FREE VIBRATION
1 INTRODUCTION:
When a system is subjected to an initial disturbance and then left free
to vibrate on its own, the resulting vibrations are referred to as free
vibrations . Free vibration occurs
when a mechanical system is set off with an initial input and then allowed to
vibrate freely. Examples of this type of vibration are pulling a child back on
a swing and then letting go or hitting a tuning fork and letting it ring. The
mechanical system will then vibrate at one or more of its "natural
frequencies" and damp down to zero.
2 BASIC ELEMENTS OF VIBRATION
SYSTEM:
Mass or
Inertia
![]()
Springiness
or Restoring element
![]()
Dissipative
element (often called damper)
![]()
External
excitation
![]()
3 CAUSES OF VIBRATION:
Unbalance: This is basically in reference to
the rotating bodies. The uneven distribution of mass in a rotating body contributes to the unbalance. A good
example of unbalance related vibration would be the
―vibrating alert‖ in our mobile phones. Here a small amount of unbalanced
weight is rotated by a motor causing the vibration which makes the mobile phone
to vibrate. You would have experienced the same sort of vibration occurring in
your front loaded washing machines that tend to vibrate during the
―spinning‖ mode.
Misalignment: This is an other major cause of
vibration particularly in machines that are
driven by motors or any other prime movers.
Bent
Shaft: A
rotating shaft that is bent also produces the the vibrating effect since it losses it rotation capability about
its center.
Gears in
the machine: The gears in the machine always tend to produce
vibration, mainly due to their
meshing. Though this may be controlled to some extent, any problem in the
gearbox tends to get enhanced with ease.
Bearings: Last but not the least, here is a
major contributor for vibration. In majority of the cases every initial problem starts in the bearings and
propagates to the rest of the members of the machine. A bearing devoid of
lubrication tends to wear out fast and fails quickly, but before this is
noticed it damages the remaining components in the machine and an initial look
would seem as if something had gone wrong with the other components leading to
the bearing failure.
Effects of vibration:
(a)Bad Effects:
The presence of vibration in any mechanical system
produces unwanted noise, high stresses, poor reliability, wear and premature
failure of parts. Vibrations are a great source of human discomfort in the form
of physical and mental strains.
(b)Good Effects:
A vibration does useful work in musical
instruments, vibrating screens, shakers, relive pain in physiotherapy.
4 METHODS OF REDUCTION OF VIBRATION:
¨ -unbalance
is its main cause, so balancing of parts is necessary.
¨ -using
shock absorbers.
¨ -using
dynamic vibration absorbers.
¨ -providing
the screens (if noise is to be reduced)
5 TYPES OF VIBRATORY MOTION:
¨ Free
Vibration
¨ Forced
Vibration
6 TERMS USED VIBRATORY MOTION:
(a)Time period (or)period of
vibration:
It is the time taken by a vibrating body to repeat
the motion itself.time period is usually expressed in seconds.
(b) Cycle:
It is the
motion completed in one time period.
(c) Periodic motion:
A motion
which repeats itself after equal interval of time.
(d)Amplitude (X)
The maximum displacement of a vibrating body from
the mean position.it is usually expressed in millimeter.
(e) Frequency (f)
The
number of cycles completed in one second is called frequency
7 DEGREES OF FREEDOM:
The minimum number of independent coordinates required to specify the
motion of a system at any instant is known as D.O.F of the system.
Single degree of freedom system:
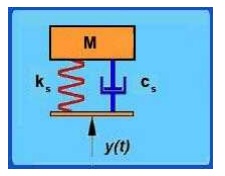
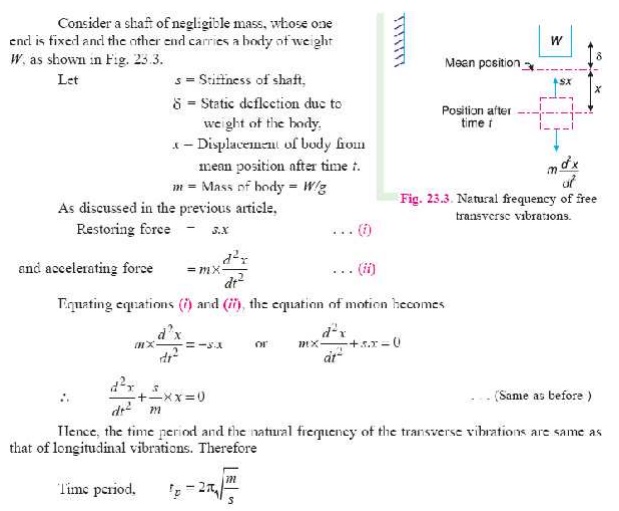
The system shown in this figure is what is known as
a Single Degree of Freedom system. We use the term degree of freedom to refer
to the number of coordinates that are required to specify completely the
configuration of the system. Here, if the position of the mass of the system is
specified then accordingly the position of the spring and damper are also
identified. Thus we need just one coordinate (that of the mass) to specify the
system completely and hence it is known as a single degree of freedom system.
Two degree of freedom system:
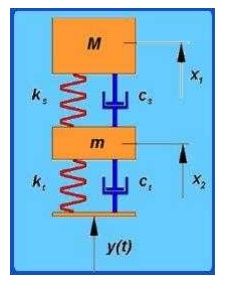
A two degree of freedom system With reference to
automobile applications, this is referred as ―quarter car‖ model. The
bottom mass refers to mass of axle, wheel etc components which are below the
suspension spring and the top mass refers to the mass of the portion of the car
and
passenger.
Since we need to specify both the top and bottom mass positions to completely
specify the system, this becomes a two degree of freedom system.
8 TYPES OF VIBRATORY MOTION:
Types of Vibration:
(a)Longitudinal vibration (b)Transverse Vibration (
c)Torsional Vibration.
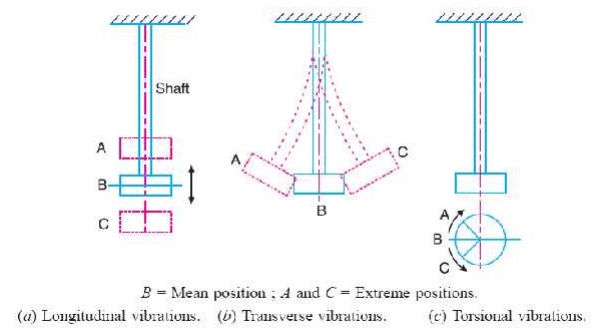
Longitudinal Vibration:
When the particles of the shaft or disc moves parallel to the axis of
the shaft, then the vibrations known as longitudinal vibrations.
Free undamped longitudinal
vibrations;
When a body is allowed to vibrate on its own, after
giving it an initial displacement, then the ensuring vibrations are known as
free or natural vibrations. When the vibrations take place parallel to the axis
of constraint and no damping is provided, then it is called free undamped
longitudinal vibrations.
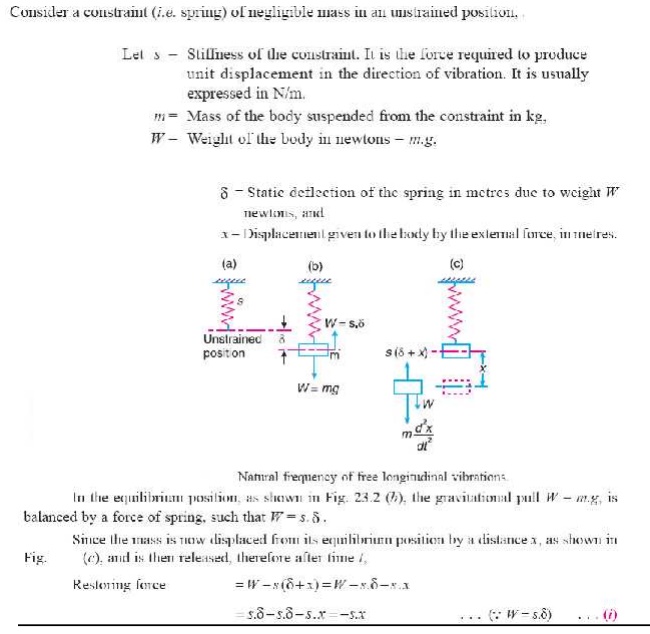
9 NATURAL FREQUENCY OF FREE
UNDAMPED LONGITUDINAL VIBRATION:
Equilibrium method or Newton ’ s
method :


Energy Method
In free
vibrations, no energy is transferred into the system or from the system.
Therefore, the total energy (sum of KE and PE)is constant and is same all the
times.

3 Rayleigh’s method
In this method, the maximum kinetic energy at mean
position is made equal to the maximum potential energy at the extreme position.
10 EQUIVALENT STIFFNESS OF
SPRING.
(1) Springs
in series
(2) Springs
in parallel
(3) Combined
springs
(4) Inclined
springs
11 DAMPING:
It is the resistance to the motion of a vibrating
body. The vibrations associated with this resistance are known as damped
vibrations.
Types of damping:
(1) Viscous
damping
(2) Dry
friction or coulomb damping
(3) Solid
damping or structural damping
(4) Slip or
interfacial damping.
Damping Coefficient:
The
damping force per unit velocity is known as damping coefficient.
Equivalent damping coefficient:
Dampers
may be connected either in series or in parallel to provide required damping.
12 DAMPED VIBRATION:
The
vibrations associated with this resistance are known as damped vibrations.
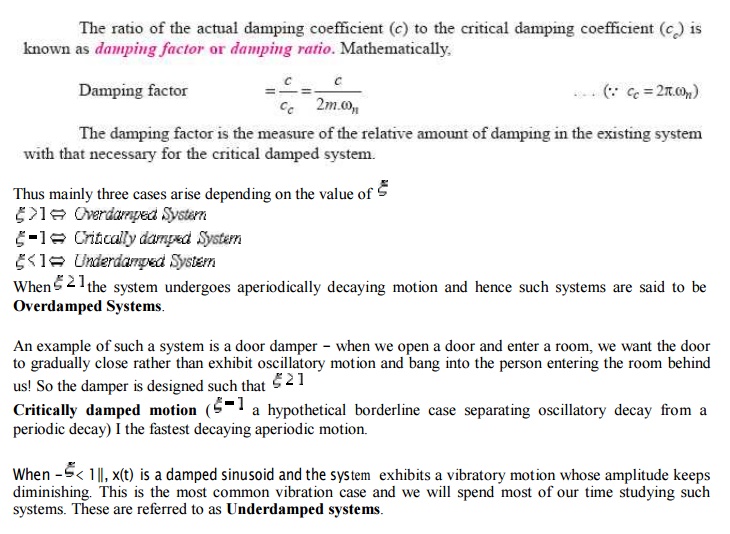
Damping factor:
Damping factor can be defined as the ratio of
actual damping coefficient to critical damping coefficient.
Logarithmic decrement:
It is defined as the natural logarithm of ratio of
any two successive amplitudes of an under damped system. It is a dimensionless
quantity.
13 TRANSVERSE VIBRATION:
When the particles of the shaft or disc moves
approximately perpendicular to the axis of the shaft, then the vibrations known
as transverse vibrations.

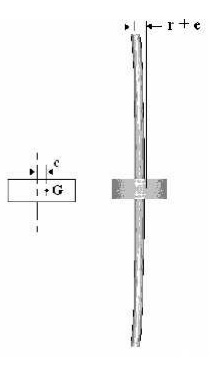
Whirling speed of shaft:
The speed, at which the shaft runs so that the additional deflection of
the shaft from the axis of rotation becomes infinite, is known as critical or
whirling speed.
No shaft can ever be perfectly straight or
perfectly balanced. When an element of mass is a distance from the axis of
rotation, centrifugal force, will tend to pull the mass outward. The elastic
properties of the shaft will act to restore the ―straightness‖. If the
frequency of rotation is equal to one of the resonant frequencies of the
shaft, whirling will occur. In order to save the machine from failure,
operation at such whirling speeds must be avoided.
The
whirling frequency of a symmetric cross section of a given length between two
points is
given by:
Where E =
young's modulus, I = Second moment of area, m = mass of the shaft, L= length of
the shaft between points
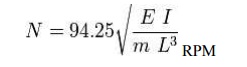
A shaft
with weights added will have an angular velocity of N (rpm) equivalent as
follows:

14 TORSIONAL VIBRATION:
When the
particles of the shaft or disc move in a circle about the axis of the shaft,
then the vibrations known as tensional vibration
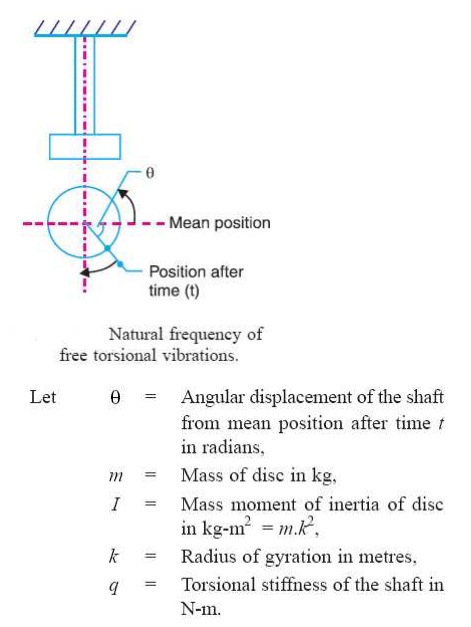

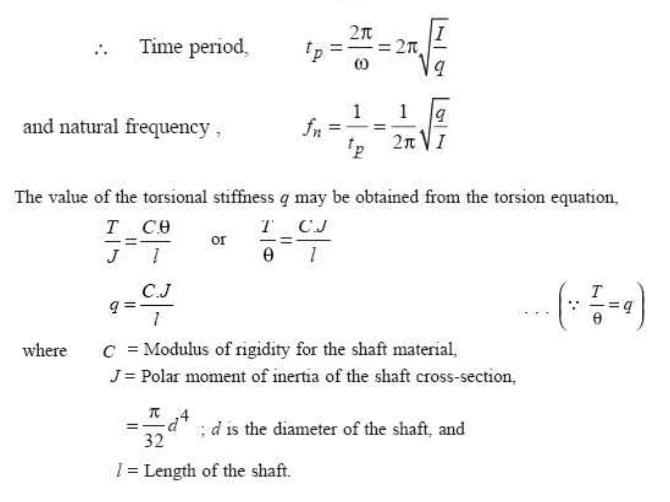
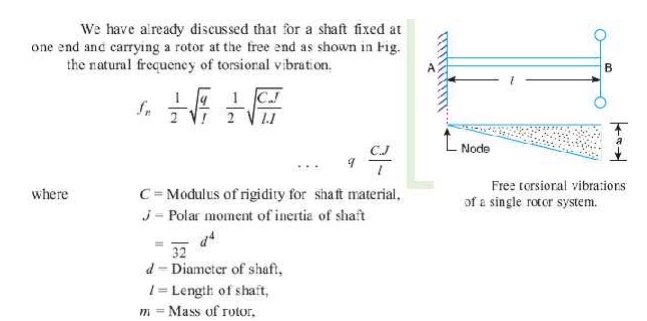
Torsional vibration of a single rotor system:
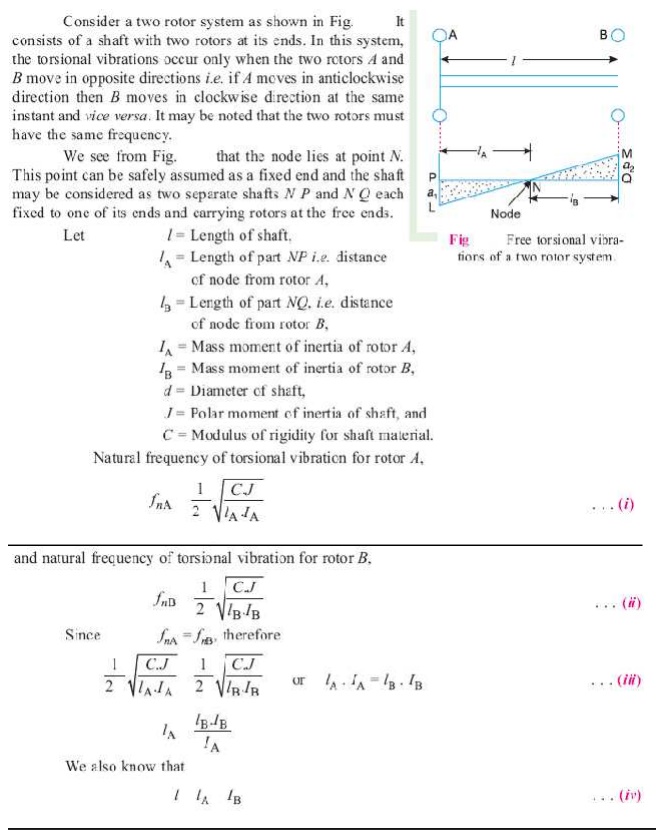
Torsional vibration of a two rotor system:
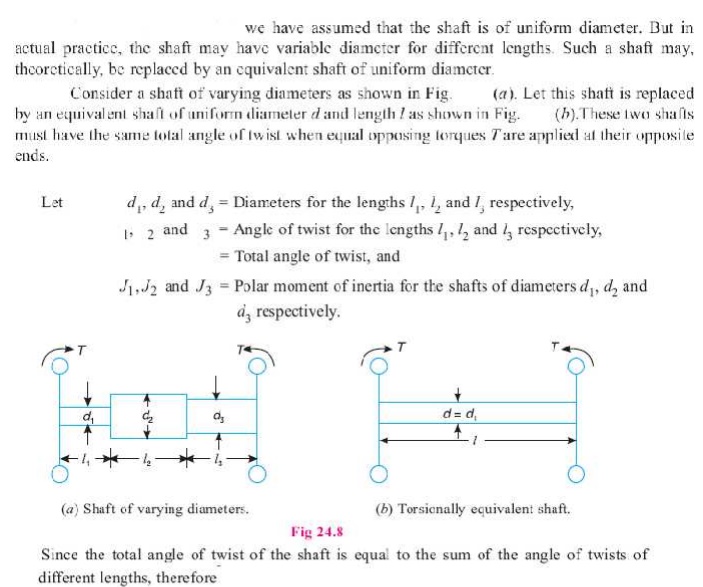
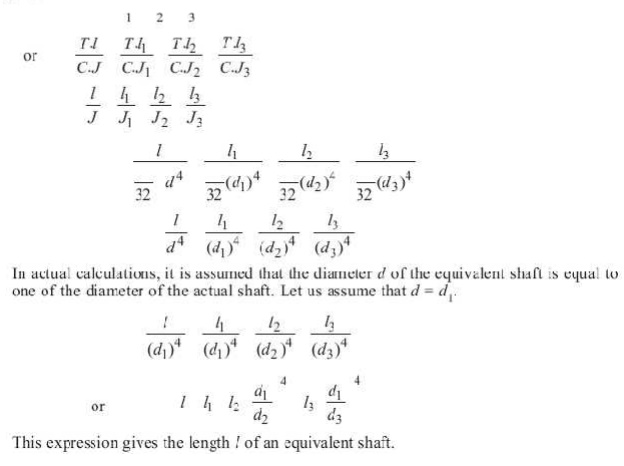
Torsionally equivalent shaft:
Related Topics