Chapter: Embedded and Real Time Systems : Process and Operating Systems
Schduling Policies
SCHDULING
POLICIES:
A scheduling
policy defines how processes are selected for promotion from the ready
state to the running state. Every multitasking OS implements some type of
scheduling policy. Choosing the right scheduling policy not only ensures that
the system will meet all its timing requirements, but it also has a profound
influence on the CPU horsepower required to implement the system’s
functionality.
Schedulability
means whether there exists a schedule of execution for the processes in a
system that satisfies all their timing requirements. In general, we must
construct a schedule to show schedulability, but in some cases we can eliminate
some sets of processes as unschedulable using some very simple tests.
Utilization
is one of the key metrics in evaluating a scheduling policy. Our most basic
requirement is that CPU utilization be no more than 100% since we can’t use the
CPU more than 100% of the time.
When we
evaluate the utilization of the CPU, we generally do so over a finite period
that covers all possible combinations of process executions. For periodic
processes, the length of time that must be considered is the hyperperiod,
which is the least-common multiple of the periods of all the processes. (The
complete schedule for the least-common multiple of the periods is sometimes
called the unrolled schedule.) If we evaluate the hyperperiod, we are sure
to have considered all possible combinations of the periodic processes.
We will
see that some types of timing requirements for a set of processes imply that we
cannot utilize 100% of the CPU’s execution time on useful work, even ignoring
context switching overhead.
However,
some scheduling policies can deliver higher CPU utilizations than others, even
for the same timing requirements.
One very
simple scheduling policy is known as cyclostatic scheduling or sometimes
as Time
Division
Multiple Access scheduling. As illustrated in Figure 3.5, a cyclostatic
schedule is divided into equal-sized time slots over an interval equal to the
length of the hyperperiod H.
Processes always run in the same time slot.
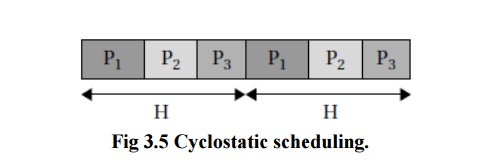
Two
factors affect utilization: the number of time slots used and the fraction of
each time slot that is used for useful work. Depending on the deadlines for
some of the processes, we may need to leave some time slots empty. And since
the time slots are of equal size, some short processes may have time left over
in their time slot
Another
scheduling policy that is slightly more sophisticated is round robin. As
illustrated in Figure 3.6, round robin uses the same hyperperiod as does
cyclostatic. It also evaluates the processes in order.
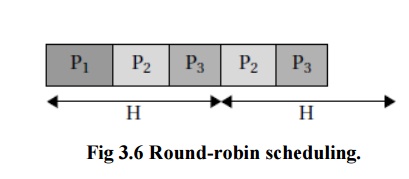
But
unlike cyclostatic scheduling, if a process does not have any useful work to
do, the round-robin scheduler moves on to the next process in order to fill the
time slot with useful work. In this example, all three processes execute during
the first hyperperiod, but during the second one, P1 has no useful work and is skipped.
The
processes are always evaluated in the same order. The last time slot in the
hyperperiod is left empty; if we have occasional, non-periodic tasks without
deadlines, we can execute them in these empty time slots. Round-robin
scheduling is often used in hardware such as buses because it is very simple to
implement but it provides some amount of flexibility.
In
addition to utilization, we must also consider scheduling overhead—the execution time required to choose the next
execution process, which is incurred in addition to any context switching
overhead.
In
general, the more sophisticated the scheduling policy, the more CPU time it
takes during system operation to implement it. Moreover, we generally achieve
higher theoretical CPU utilization by applying more complex scheduling policies
with higher overheads.
The final
decision on a scheduling policy must take into account both theoretical
utilization and practical scheduling overhead.
Related Topics