Chapter: Embedded and Real Time Systems : Process and Operating Systems
Multiprocessor
MULTIPROCESSOR:
A multiprocessor
is, in general, any computer system with two or more processors coupled
together. Multiprocessors used for scientific or business applications tend to
have regular architectures: several identical processors that can access a
uniform memory space. We use the term processing element (PE) to mean any
unit responsible for computation, whether it is programmable or not.
Embedded
system designers must take a more general view of the nature of
multiprocessors. As we will see, embedded computing systems are built on top of
an astonishing array of different multiprocessor architectures.
The first
reason for using an embedded multiprocessor is that they offer significantly
better cost/performance—that is, performance and functionality per dollar spent
on the system—than would be had by spending the same amount of money on a
uniprocessor system. The basic reason for this is that processing element
purchase price is a nonlinear
function of performance [Wol08].
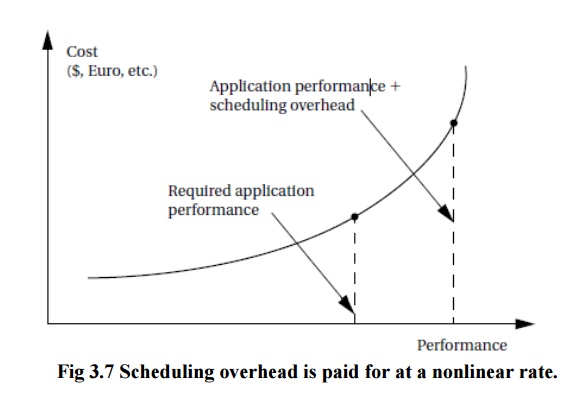
The cost
of a microprocessor increases greatly as the clock speed increases. We would
expect this trend as a normal consequence of VLSI fabrication and market
economics. Clock speeds are normally distributed by normal variations in VLSI
processes; because the fastest chips are rare, they naturally command a high
price in the marketplace.
Because
the fastest processors are very costly, splitting the application so that it
can be performed on several smaller processors is usually much cheaper.
Even with
the added costs of assembling those components, the total system comes out to
be less expensive. Of course, splitting the application across multiple
processors does entail higher engineering costs and lead times, which must be
factored into the project.
In
addition to reducing costs, using multiple processors can also help with real
time performance. We can often meet deadlines and be responsive to interaction
much more easily when we put those time-critical processes on separate
processors. Given that scheduling multiple processes on a single
Because
we pay for that overhead at the nonlinear rate for the processor, as
illustrated in Figure 3.7, the savings by segregating time-critical processes
can be large—it may take an extremely large and powerful CPU to provide the same
responsiveness that can be had from a distributed system.
Many of
the technology trends that encourage us to use multiprocessors for performance
also lead us to multiprocessing for low power embedded computing.
Several
processors running at slower clock rates consume less power than a single large
processor: performance scales linearly with power supply voltage but power
scales with V2.
Austin et al. [Aus04] showed that
general-purpose computing platforms are not keeping up with the strict energy
budgets of battery-powered embedded computing. Figure 3.8 compares the
performance of power requirements of desktop processors with available battery
power. Batteries can provide only about 75 Mw of power.
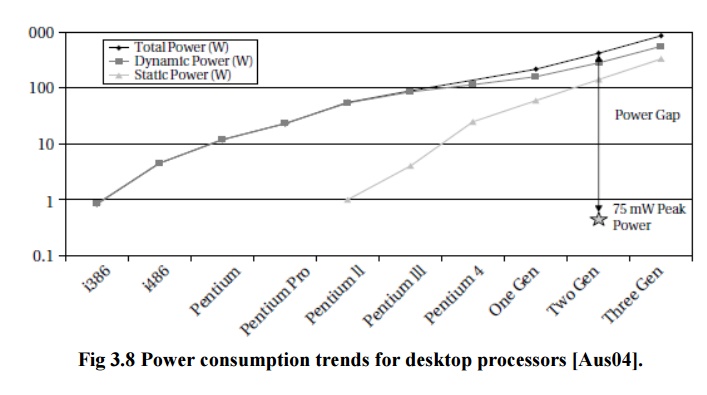
Desktop
processors require close to 1000 times that amount of power to run. That huge
gap cannot be solved by tweaking processor architectures or software.
Multiprocessors provide a way to break through this power barrier and build
substantially more efficient embedded computing platforms.
Related Topics