Chapter: Embedded and Real Time Systems : Process and Operating Systems
Interprocess Communication Mechanisms
INTERPROCESS
COMMUNICATION MECHANISMS:
Processes
often need to communicate with each other. Interprocess communication mechanisms
are provided by the operating system as part of the process
abstraction.
In
general, a process can send a communication in one of two ways: blocking
or nonblocking.
After sending a blocking communication, the process goes into the waiting state
until it receives a response.
Nonblocking
communication allows the process to continue execution after sending the communication.
Both types of communication are useful. There are two major styles of
interprocess communication: shared memory and message
passing.
Shared Memory Communication:
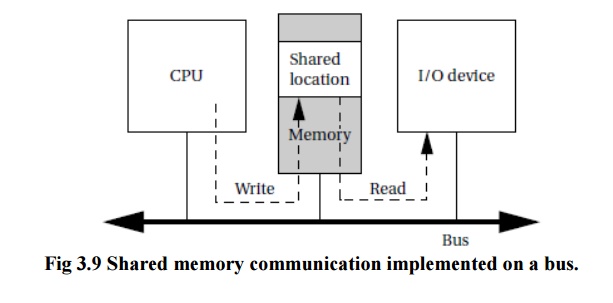
Figure
3.9 illustrates how shared memory communication works in a bus-based system.
Two components, such as a CPU and an I/O device, communicate through a shared
memory location. The software on the CPU has been designed to know the address
of the shared location.
The
shared location has also been loaded into the proper register of the I/O
device. If, as in the figure, the CPU wants to send data to the device, it
writes to the shared location. The I/O device then reads the data from that
location. The read and write operations are standard and can be encapsulated in
a procedural interface.
As an
application of shared memory, let us consider the situation of Figure 6.14 in
which the CPU and the I/O device want to communicate through a shared memory
block. There must be a flag that tells the CPU when the data from the I/O
device is ready.
The flag,
an additional shared data location, has a value of 0 when the data are not
ready and 1 when the data are ready. If the flag is used only by the CPU, then
the flag can be implemented using a standard memory write operation. If the
same flag is used for bidirectional signaling between the CPU and the I/O
device, care must be taken. Consider the following scenario:
·
CPU reads the flag location and sees that it is 0.
·
I/O device reads the flag location and sees that it
is 0.
·
CPU sets the flag location to 1 and writes data to
the shared location.
·
I/O device erroneously sets the flag to 1 and
overwrites the data left by the CPU.
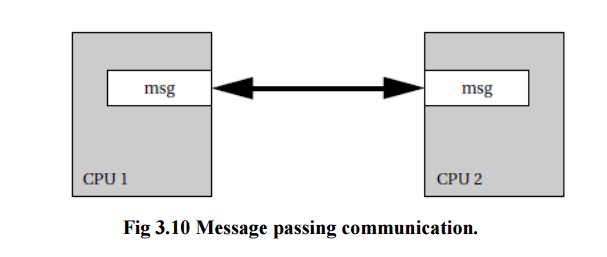
Message Passing:
Message
passing communication complements the shared memory model. As shown in Figure
3.10, each communicating entity has its own message send/receive unit. The
message is not stored on the communications link, but rather at the senders/
receivers at the end points.
In
contrast, shared memory communication can be seen as a memory block used as a
communication device, in which all the data are stored in the communication
link/memory.
Applications
in which units operate relatively autonomously are natural candidates for
message passing communication. For example, a home control system has one
microcontroller per household device—lamp, thermostat, faucet, appliance, and
so on.
The
devices must communicate relatively infrequently; furthermore, their physical
separation is large enough that we would not naturally think of them as sharing
a central pool of memory.
Passing
communication packets among the devices is a natural way to describe
coordination between these devices. Message passing is the natural
implementation of communication in many 8-bit microcontrollers that do not
normally operate with external memory.
Signals
Another
form of interprocess communication commonly used in Unix is the signal.
A signal is simple because it does not pass data beyond the existence of the
signal itself. A signal is analogous to an interrupt, but it is entirely a
software creation. A signal is generated by a process and transmitted to
another process by the operating system.
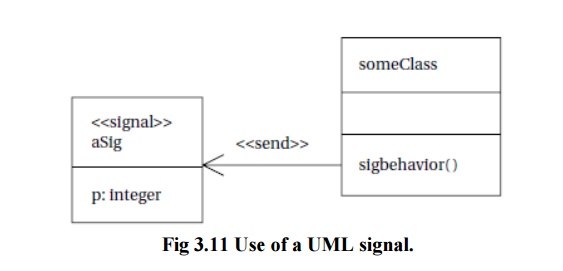
A UML
signal is actually a generalization of the Unix signal. While a Unix signal
carries no parameters other than a condition code, a UML signal is an object.
As such, it can carry parameters as object attributes. Figure 3.11 shows the
use of a signal in UML. The sigbehavior
( ) behavior of the class is responsible for throwing the signal, as indicated
by <<send>>.The signal
object is indicated by the <<signal>>
stereotype.
Related Topics