Chapter: Advanced Computer Architecture : Multi-Core Architectures
Important Questions and Answers: Multi-Core Architectures
1. Define software multithreading
The ability of an operating system to execute
different parts of a program, called threads, simultaneously. The programmer
must carefully design the program in such a way that all the threads can run at
the same time without interfering with each other
2. What are the advantages of multithreading
If a
thread can not use all the computing resources of the CPU (because instructions
depend on each other's result), running another thread permits to not leave
these idle. If several threads work on the same set of data, they can actually
share its caching, leading to better cache usage or synchronization on its
values.
If a
thread gets a lot of cache misses, the other thread(s) can continue, taking
advantage of the unused computing resources, which thus can lead to faster
overall execution, as these resources would have been idle if only a single
thread was executed
3.
What are
the two levels of thread?
Ø User
Threads
Ø Kernel
Threads
4.
What are
the multithreading models available?
Ø Many
threads on one LWP (many-to-one)
Ø One
thread per LWP (one-to-one)
Ø Many
threads on many LWPs (many-to-many)
5.
What is
Many-to-one model?
The many-to-one model maps many user-level threads
to one kernel thread. Advantages: Totally portable More efficient
Disadvantages: cannot take advantage of parallelism The entire process is block
if a thread makes a blocking system call Mainly used in language systems,
portable libraries like solaris 2
6. What is One-to-one model?
The one-to-one model maps each user thread to a
kernel thread. Advantages: allows parallelism Provide more concurrency
Disadvantages: Each user thread requires corresponding kernel thread limiting
the number of total threads Used in LinuxThreads and other systems like Windows
2000,Windows NT
7. What is Many-to-many model?
The many-to-many model multiplexes many user-level
threads to a smaller or equal number of kernel threads. Advantages: Can create
as many user thread as necessary Allows parallelism Disadvantages: kernel
thread can the burden the performance Used in the Solaris implementation of
Pthreads (and several other Unix implementations)
8.
What are
the factors will affect issue slot?
Imbalances
in the resource needs.
Ø Resource
availability over multiple threads.
Ø Number of
active threads considered.
Ø Finite
limitations of buffer.
Ø Ability
to fetch enough instructions from multiple threads.
Ø Practical
limitations of what instructions combinations can issue from one thread and
multiple threads.
9.
Give
Comparison of SMT vs Superscalar
SMT processors are compared to base superscalar processors in several
key measures:
Ø Utilization
of functional units.
Ø Utilization
of fetch units.
Ø Accuracy
of branch predictor.
Ø Hit rates
of primary caches.
Ø Hit rates
of secondary caches.
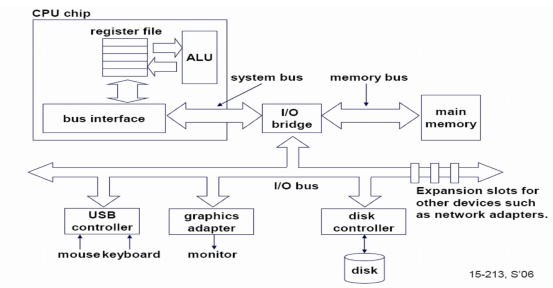
10. Draw the architecture of Single core computer
11. What are the design issues of
SMT & CMP architectures?
They determine the performance measures of each processor in a precise
manner. The issue slots usage limitations and its issues also determine the
performance.Why Multithreading Today ILP is exhausted, TLP is in. Large
performance gap between MEMORY and PROCESSOR. Too many transistors on chip.
More existing MT applications today. Multiprocessors on a single chip. Long
network latency, too
12. What is a Multi-core
processor?
Each core
has its execution pipeline. No limitation for the number of cores that can be
placed in a single chip. Two cores run at slower speeds and lower temperatures.
But the combined throughput > single processor. The fundamental relationship
b/w freq. and power can be used to multiply the no. of cores from 2 to 4, 8 and
even higher
13.
What are
the benefits of Intel Multi-core processor?
Ø Multi-core
performance.
Ø Dynamic
scalability.
Ø Design
and performance scalability
Ø Intelligent
performance on-demand
Ø Increased
performance on Highly-threaded apps.
Ø Scalable
shared memory.
14.
What is a
IBM cell processor?
A chip with one PPC hyper-threaded core called PPE
and eight specialized cores called SPEs.The challenge to be solved by the Cell
was to put all those cores together on a single chip. This was made possible by
the use of a bus with outstanding performance
The Cell
processor can be split into four components:
Ø external
input and output structures,
Ø the main
processor called the Power Processing Element (PPE)
Ø eight
fully-functional co-processors called the Synergistic Processing Elements, or
SPEs,
Ø a
specialized high-bandwidth circular data bus connecting the PPE, input/output
elements and the SPEs, called the Element Interconnect Bus or EIB.
Related Topics