Chapter: Embedded and Real Time Systems : Case Study
Hardware and Software Co-Design- Embedded and Real Time Systems
HARDWARE
AND SOFTWARE CO-DESIGN:
Distributed embedded systems can be organized in many different ways
depending upon the needs of the application and cost constraints. One good way
to understand possible architectures is to consider the different types of
interconnection networks that can be used.
A point-to-point link establishes a connection between exactly
two PEs. Point to point links is simple to design precisely because they deal
with only two components. We do not have to worry about other PEs interfering
with communication on the link.
Figure 5.1 shows a simple example of a distributed embedded system built
from point-to-point links. The input signal is sampled by the input device and
passed to the first digital filter, F1, over a point-to-point link. The
results of that filter are sent through a second point-to-point link to filter F2. The results in turn are sent to the
output device over a third point-to-point link.
A digital filtering system requires that its outputs arrive at strict
intervals, which means that the filters must process their inputs in a timely
fashion. Using point-to-point connections allows both F1 and F2 to receive a
new sample and send a new output at the same time without worrying about
collisions on the communications network.
It is possible to build a full-duplex, point-to-point
connection that can be used for simultaneous communication in both directions
between the two PEs. (A halfduplex connection allows for only one-way
communication.)
A bus is a more general form of network since it
allows multiple devices to be connected to it. Like a microprocessor bus, PEs
connected to the bus have addresses. Communications on the bus generally take
the form of packets as illustrated in Figure 5.2. A packet contains an
address for the destination and the data to be delivered.
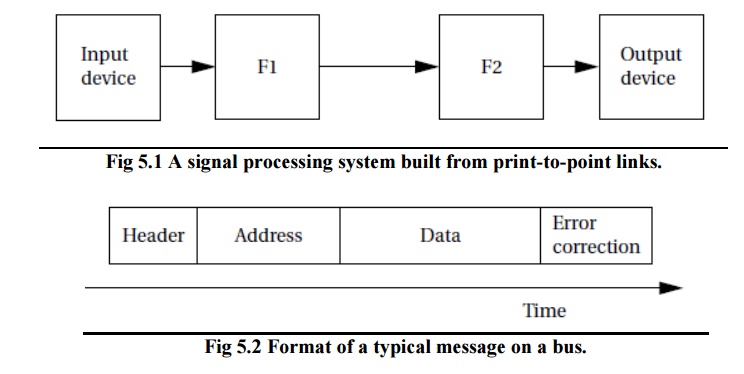
It frequently includes error detection/correction information such as
parity. It also may include bits that serve to signal to other PEs that the bus
is in use, such as the header shown in the figure.
The data to be transmitted from one PE to another
may not fit exactly into the size of the data payload on the packet. It
is the responsibility of the transmitting PE to divide its data into packets;
the receiving PE must of course reassemble the complete data message from the
packets.
Distributed system buses must be arbitrated to control simultaneous
access, just as with microprocessor buses. Arbitration scheme types are
summarized below.
Fixed-priority
arbitration always gives priority to competing devices in the
same way. If a high-priority and a
low-priority device both have long data transmissions ready at the same time,
it is quite possible that the low-priority device will not be able to transmit
anything until the high-priority device has sent all its data packets.
Fair
arbitration schemes make sure that no device is starved. Round-robin
arbitration is the most commonly used of the fair arbitration schemes.
The PCI bus requires that the arbitration scheme used on the bus must be fair,
although it does not specify a particular arbitration scheme. Most
implementations of PCI use round-robin arbitration.
A bus has limited available bandwidth. Since all devices connect to the
bus, communications can interfere with each other. Other network topologies can
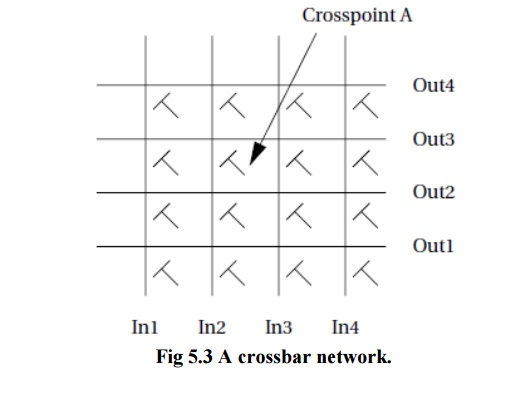
be used to reduce communication conflicts. At the opposite end of the
generality spectrum from the bus is the crossbar network shown in Figure
5.3.
A crossbar not only allows any input to be
connected to any output, it also allows all combinations of input/output
connections to be made. Thus, for example, we can simultaneously connect in1 to out4, in2 to out3, in3 to out2, and in4 to out1 or any other combinations of inputs.
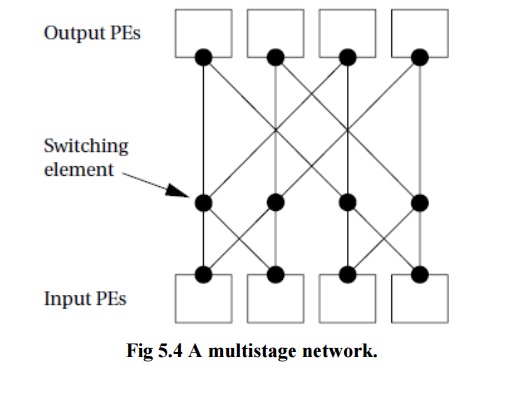
Many other networks have been designed that provide varying amounts of
parallel communication at varying hardware costs. Figure 5.4 shows an example multistage
network. The crossbar of Figure 5.3 is a direct network in which
messages go from source to destination without going through any memory
element.
Multistage networks have intermediate routing nodes to guide the data
packets.
Most networks are blocking, meaning that there are
some combinations of sources and destinations for which messages cannot be
delivered simultaneously.
A bus is a maximally blocking network since any message on the bus
blocks messages from any other node. A crossbar is non-blocking.
In general, networks differ from microprocessor buses in how they
implement communication protocols. Both need handshaking to ensure that PEs do
not interfere with each other. But in most networks, most of the protocol is
performed in software.
Microprocessors rely on bus hardware for fast
transfers of instructions and data to and from the CPU. Most embedded network
ports on microprocessors implement the basic communication functions (such as
driving the communications medium) in hardware and implement many other
operations in software.
An alternative to a non-bus network is to use multiple networks. As with
PEs, it may be cheaper to use two slow, inexpensive networks than a single high
performance, expensive network.
If we can segregate critical and noncritical communications onto
separate networks, it may be possible to use simpler topologies such as buses.
Many systems use serial links for low-speed communication and CPU buses for
higher speed and volume data transfers.
Related Topics