Chapter: Analysis and Design of Algorithm : Divide and Conquer, Greedy Method
Greedy Method Algorithm
GREEDY TECHNIQUES
The
greedy approach suggests constructing a solution through a sequence of steps,
each expanding a partially constructed solution obtained so far, until a
complete solution to the problem is reached. On each step—and this is the
central point of this technique—the choice made must be
•
Feasible, i.e.,
it has to satisfy the problem‘s constraints.
•
Locally
optimal, i.e., it has to be the best local choice among all feasible choices available on that step.
•
Irrevocable, i.e.,
once made, it cannot be changed on subsequent steps of the algorithm.
GENERAL METHOD
PRIM’S ALGORITHM
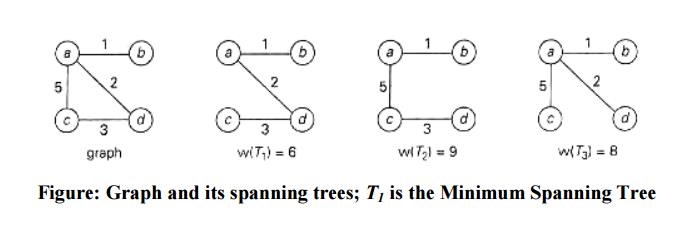
Definition:
A spanning tree of a connected graph is
its connected acyclic subgraph (i.e., a tree) that contains all the vertices of
the graph. A minimum spanning tree of a weighted connected graph is its
spanning tree of the smallest weight, where the weight of a tree is defined as
the sum of the weights on all its edges. The minimum spanning tree problem is
the problem of finding a minimum spanning tree for a given weighted connected
graph.
Two serious difficulties to
construct Minimum Spanning Tree
1.
The number of spanning trees grows exponentially
with the graph size (at least for dense graphs).
2.
Generating all spanning trees for a given graph is
not easy.
Prim‘s
algorithm constructs a minimum spanning tree through a sequence of expanding
subtrees. The initial subtree in such a sequence consists of a single vertex
selected arbitrarily from the set V of the graph‘s vertices. On each iteration,
we expand the current tree in the greedy manner by simply attaching to it the
nearest vertex not in that tree. The algorithm stops after all the graph‘s
vertices have been included in the tree being constructed. Since the algorithm
expands a tree by exactly one vertex on each of its iterations, the total
number of such iterations is n-1, where n is the number of vertices in the graph.
The tree generated by the algorithm is obtained as the set of edges used for
the tree expansions.
Pseudocode of this algorithm
The
nature of Prim‘s algorithm makes it necessary to provide each vertex not in the
current tree with the information about the shortest edge connecting the vertex
to a tree vertex. We can provide such information by attaching two labels to a
vertex: the name of the nearest tree vertex and the length (the weight) of the
corresponding edge. Vertices that are not adjacent to any of the tree vertices
can be given the label indicating their ―infinite‖ distance to the tree vertices a null label for the
name of the nearest tree vertex. With such labels, finding the next vertex to
be added to the current tree T = (VT, ET) become simple
task of finding a vertex with the smallest distance label in the set V - VT.
Ties can be broken arbitrarily.
After we
have identified a vertex u* to be added to the tree, we need to perform two
operations:
•
Move u* from the set V—VT to the set of
tree vertices VT.
•
For each remaining vertex U in V—VT -
that is connected to u* by a shorter edge than the u‘s current distance label,
update its labels by u* and the weight of the edge between u* and u,
respectively.
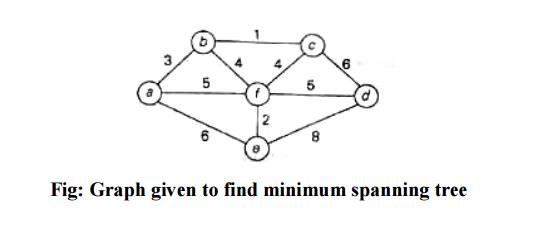
The
following figure demonstrates the application of Prim‘s algorithm to a specific
graph.
CONTAINER LOADING
The
greedy algorithm constructs the loading plan of a single container layer by
layer from the bottom up. At the initial stage, the list of available surfaces
contains only the initial surface of size L
x W with its initial position at
height 0. At each step, the algorithm picks the lowest usable surface and then
determines the box type to be packed onto the surface, the number of the boxes
and the rectangle area the boxes to be packed onto, by the procedure select layer.
The
procedure select layer calculates a
layer of boxes of the same type with the highest evaluation value. The
procedure select layer uses
breadth-limited tree search heuristic to determine the most promising layer,
where the breadth is different depending on the different depth level in the
tree search. The advantage is that the number of nodes expanded is polynomial
to the maximal depth of the problem, instead of exponentially growing with regard
to the problem size. After packing the specified number of boxes onto the
surface according to the layer arrangement, the surface is divided into up to
three sub-surfaces by the procedure divide
surfaces.
Then, the
original surface is deleted from the list of available surfaces and the newly
generated sub-surfaces are inserted into the list. Then, the algorithm selects
the new lowest usable surface and repeats the above procedures until no surface
is available or all the boxes have been packed into the container. The
algorithm follows a similar basic framework.
The
pseudo-code of the greedy algorithm is given by the greedy heuristic procedure.
procedure
greedy heuristic()
list of surface := initial
surface of L x W at height 0 list of box type := all box types
while (there exist usable
surfaces) and (not all boxes are packed) do
select the lowest usable surface
as current surface set depth := 0
set best layer := select
layer(list of surface, list of box type, depth)
pack best layer on current surface
reduce the number of the packed
box type by the packed amount
set a list of new surfaces :=
divide surfaces(current surface, best layer, list of box type)
delete current surface from the
list of surfaces
insert each surface in list of
new surfaces into list of surfaces
end while
Given a
layer of boxes of the same type arranged by the G4-heuristic, the layer is
always packed in the bottom-left corner of the loading surface.
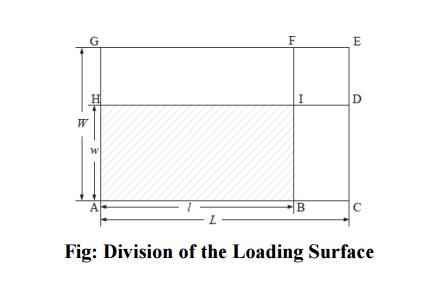
As
illustrated in above Figure, up to three sub-surfaces are to be created from
the original loading surface by the procedure divide surfaces, including the top surface, which is above the
layer just packed, and the possible spaces that might be left at the sides.
If l = L
or w = W, the original surface is simply divided into one or two
sub-surfaces, the top surface and a possible side surface. Otherwise, two
possible division variants exist, i.e., to divide into the top surface, the
surface (B,C,E,F) and the surface (F,G,H, I), or to divide into the top surface,
the surface (B,C,D, I) and the
surface (D,E,G,H).
The
divisions are done according to the following criteria, which are similar to
those in [2] and [5]. The primary criterion is to minimize the total unusable
area of the division variant. If none of the remaining boxes can be packed onto
a sub-surface, the area of the sub-surface is unusable. The secondary criterion
is to avoid the creation of long narrow strips.
―The
underlying rationale is that narrow areas might be difficult to fill
subsequently‖. More
specifically, if L−l ≥ W
−w, the loading surface is divided
into the top surface, the surface (B,C,E,F)
and the surface (F,G,H, I).
Otherwise, it is divided into the top surface, the surface (B,C,D, I) and the surface (D,E,G,H).
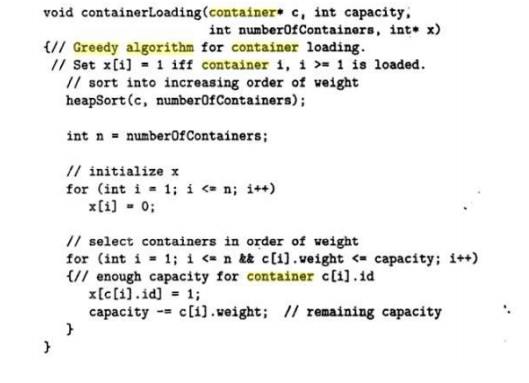
Algorithm
for Container Loading
Related Topics