Chapter: Engineering Mechanics : Equilibrium of Rigid Bodies
Equilibrium of Rigid Bodies
EQUILIBRIUM OF RIGID BODIES
Free body Diagram
A diagram
of a body (or a part of it) which shows all the forces and couples applied on
it, and which has all the forces and couples labeled for use in the solution of
the problem is called a free-body diagram. Follow these steps to draw a
free-body diagram.
1. Select
the body (or part of a body) that you
want to analyze, and draw it.
2. Identify
all the forces and couples that are applied onto the body and draw them on the
body. Place each force and couple at the point that it is applied.
3. Label all
the forces and couples with unique labels for use during the solution process.
4. Add any
relevant dimensions onto your picture.
1.Forces and couples on a free-body diagram
Each
force or couple you put on a free-body diagram represents a model of how the
body in the free-body diagram is effected by its surroundings. In selecting the
forces and couples that are to be applied on the free-body diagram follow these
steps:
1. Identify
all the forces which come from the interaction of one body with another. Many
of the common supports and their effects are shown in Table 5-1 on page 184.
Remember that for each way in which a support restricts the free motion of the
body, a force or a moment must be applied to the body to impose the restriction
on the motion.
2. Apply the
weight of the body to its center of gravity (if it is uniform, then apply it to
the centroid).
3. Remember
that strings and cables can only pull on an object.
4. Remember
that internal loads cancel out and should not be put on the free-body diagram.
5
Remember that if you have selected the direction of forces or couples of
interaction on one body, then Newton’s 3rd law states that you must
apply the forces or couples in the opposite direction on
the other
body.
Types of supports and their reactions
Types of
reaction and its direction will depend upon the type of support provided.
1.Friction
less or smooth surface support
2.Roller
support
3.Knife
edge support
4.Hinged
or pinnrd support
5.Fixed
or built in support
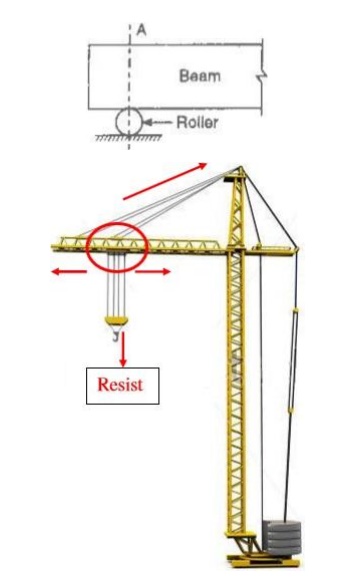
1 Roller Supports
Roller
supports are free to rotate and translate along the surface upon which the
roller rests. The surface may be horizontal, vertical or slopped at any angle.
Roller supports are commonly located at one end of long bridges in the form of
bearing pads. This support allows bridge structure to expand and contract with
temperature changes and without this expansion the forces can fracture the
supports at the banks. This support cannot provide resistance to lateral
forces. Roller support is also used in frame cranes in heavy industries as
shown in figure, the support can move towards left, right and rotate by
resisting vertical loads thus a heavy load can be shifted from one place to
another horizontally
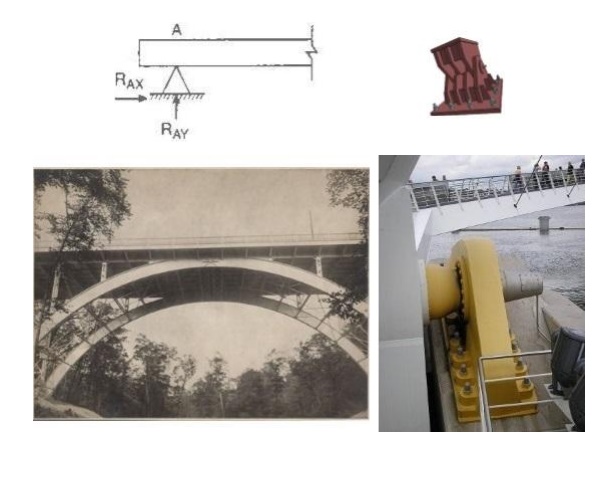
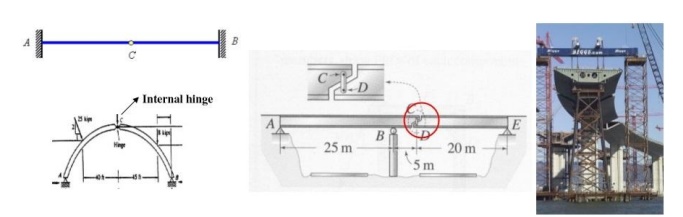
2 Hinge Supports
The hinge
support is capable of resisting forces acting in any direction of the plane.
This support does not provide any resistance to rotation. The horizontal and
vertical component of reaction can be determined using equation of equilibrium.
Hinge support may also be used in three hinged arched bridges at the banks
supports while at the center internal hinge is introduced. It is also used in
doors to produce only rotation in a door. Hinge support reduces sensitivity to
earthquake.
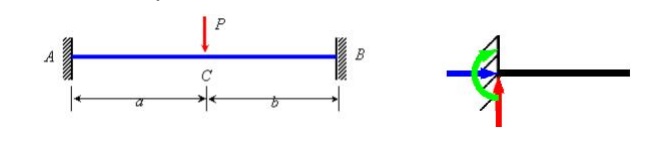
3 Fixed Support
Fixed
support can resist vertical and horizontal forces as well as moment since they
restrain both rotation and translation. They are also known as rigid support
For the stability of a structure there should be one fixed support. A flagpole
at concrete base is common example of fixed support In RCC structures the steel
reinforcement of a beam is embedded in a column to produce a fixed support as
shown in above image. Similarly all the riveted and welded joints in steel
structure are the examples of fixed supports Riveted connection are not very
much common now a days due to the introduction of bolted joints.
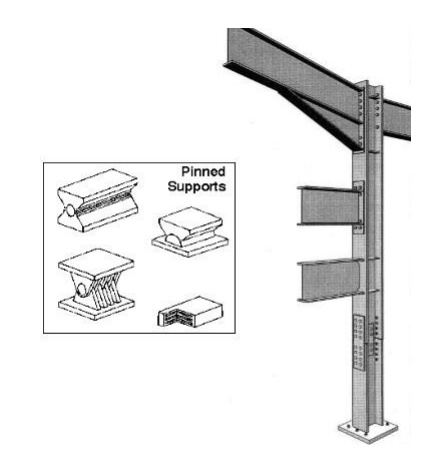
4 Pinned Supports
A pinned
support is same as hinged support. It can resist both vertical and horizontal
forces but not a moment. It allows the structural member to rotate, but not to
translate in any direction. Many connections are assumed to be pinned
connections even though they might resist a small amount of moment in reality.
It is also true that a pinned connection could allow rotation in only one
direction; providing resistance to rotation in any other direction. In human
body knee is the best example of hinged support as it allows rotation in only
one direction and resists lateral movements. Ideal pinned and fixed supports
are rarely found in practice, but beams supported on walls or simply connected
to other steel beams are regarded as pinned. The distribution of moments and
shear forces is influenced by the support condition.
5 Internal Hinge
Interior
hinges are often used to join flexural members at points other than supports.
For example in above fig two halves of an arch is joined with the help of
internal hinge.In some cases it is intentionally introduced so that excess load
breaks this weak zone rather than damaging other structural elements as shown
in above image.
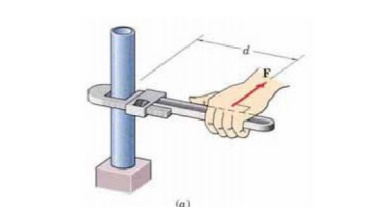
Moments
The
tendency of a force to move the body in the direction of its application a
force can tend to rotate a body about an axis. This axis may be any line which
is neither intersects nor parallel to the line of the action of the force. This
rational tendency of force is know as the moment of force. As a familiar
example of the concept of moment, consider the pipe wrench as shown in figure
(a). One effect of the force applied perpendicular to the handle of the wrench
is the tendency to rotate the pipe about its vertical axis. The magnitude of
this tendency depends on both the magnitude of the force and the effective
length d of the wrench handle.Common experience shown that a pull which is not
perpendicular to the wrench handle is less effective than the right angle pull.
Mathematically this tendency of force (moment) is calculated by multiplying
force to the moment
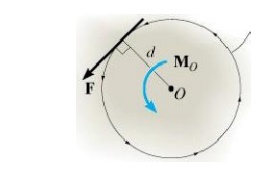
1 Moment about a point
Consider
following body (two dimensional) acted by a force F in its plane. The magnitude
of moment or tendency of the force to rotate the body about the axis O_O
perpendicular to the plane of the body is proportional both to the magnitude of
the force and to the moment arm d, therefore magnitude of the moment is defined
as the product of force and moment arm.
Moment =
Force x moment arm
M = Fd
Where d =
moment arm and F = magnitude of force
Moment
arm is defined as the perpendicular distance between axis of rotation and the
line of action of force.
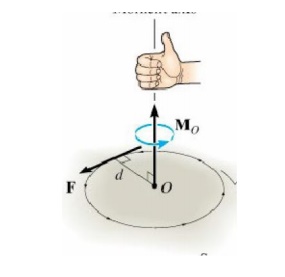
2 Direction of moment of a force
The
direction Mo is specified using the “right-hand rule”. To do this the fingers
of the right hand are curled such that they follow the sense of rotation, which
would occur if the force could rotate about point O. The thumb then point along
the moment axis so that it gives the direction and sense of the moment vector,
which is upward and perpendicular to the shaded plane containing F and d.
3 Clock Wise And Anti Clock Wise Moments
The
moment are classified as clockwise and anticlockwise moment according to the
direction in which the force tends to rotate the body about a fixed point
Clockwise Moment
When the
force tends to rotate the body in the same direction in which the hands of
clock move is called clockwise moment the clockwise moment is taken as positive
or other wise mentioned.
Anticlockwise Moment
When the
force tends to rotate the body in the opposite direction in which the hands of
clock move is called anti clockwise moment which is taken as negative or
otherwise mentioned.
4 Unit of moment
S.I unit
is N.m. (Newton. meter)
F.P.S
unit is lb. ft (Pound. foot)
G.G.S
unit is dyne.cm (dyne. Centimeter) etc
Example 1: Determine the moment of the force about
point “O” for following diagram.
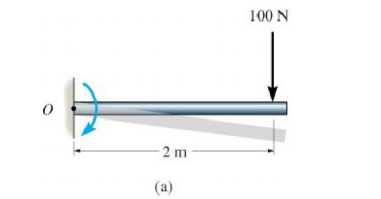
Given Force=100
N
Moment
arm=2m
Required Mo=?
Working formula: - MO=Force x Moment arm.
Sol putt
the values in first w, f
Mo= F x r
= 100 x 2
Mo=
200N.m.
Result: -
Moment = 200N.m Direction =Clock wise
Example 2: Determine the moment of the force 800 N
acting on the frame about points A, B, C and D.
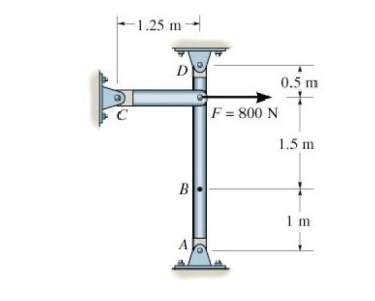
Given
Force = F
= 800 N
Required MA=? MB? MC=? MD=?
Working formula
Moment
=force x moment arm. Sol Solve this question step by step Now first consider
the Point A. MA = F x r
MA = 800
x (1.5+1)
MA = 2000 N.m clock wise_______ I Now Moment about B
MB = F x
r = 800x 5
MB = 1200 N m clock wise________ (2)
From (1)
and (2) it is evidence that when force remain constant then moment varies with
moment arm that is moment depends upon moment arm. Similarly it can be proved
that moment about any point varies with force when moment arm remain same.
Now
consider point C Moment = Force x distance Mc = 800 x 0
Mc = 0.
_______ (3)
As the
line of action of force passes through point C
that is
point of application it shows that the line of action should be perpendicular
to the point i.e. “C”
Now
consider the point D. MD = F x r.
MD = 800
x 0.5 MD= 400 N.m
Result
MA =2000 N.m clock wise Or
MA = + 200 N.m
MB = 1200 N.m clock wise Or
MB = + 1200 N.m
MC = O.
Mc = O
MD =. 400 N.m anti clock wise
MD = - 400N.m
4 Principle of Moment/ Varignon’s Theorem
It is
stated that the moment of a force about a point is equal to the sum of the
moments of the force components about the point. Or the moment produce by the
resultant force is equal to the moment produce by the force components.
Mathematically
MFo = Σ Mo
Example 3: A 200 N force acts on the bracket as shown determine the moment of force about “A”
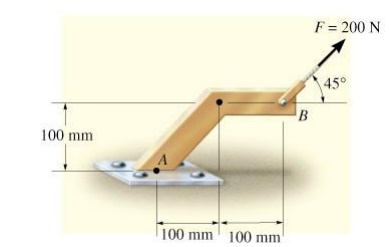
Given F=200N θ = 45º
Required MA =?
Solution Resolve the force into components
F1 am F2
F1= F cos
θ F1=200 cosine 45º
F1=141.42N.
F2= F sin
θ F2 = 200 sin 45º
F2= 2.468N.
We know
that MA = 0
MA =
moment produce due to component F1+ moment produce due to component F2.
MA =F1 x
r1+ F2 x r2.
Let us
consider that clock wise moment is + ve. MA = F1 x r1+ F2 x r2
MA = -
141.42 x 0.1 + 2.468 x (0.1 +0.1) MA = - 13.648 N
MA = 13
.648 N anti clock wise.
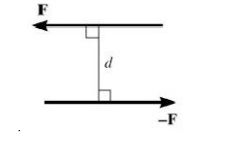
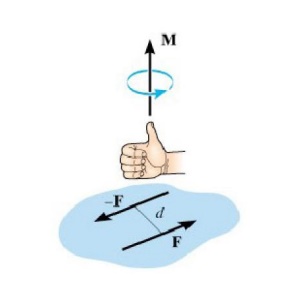
Couple
When two
parallel forces that have the same magnitude but opposite direction is known as
couple. The couple is separated by perpendicular distance. As matter of fact a
couple is unable to produce any straight-line motion but it produces rotation
in the body on which it acts. So couple can be defined as unlike parallel
forces of same magnitude but opposite direction which produce rotation about a
specific direction and whose resultant is zero
1 Application of Couple
1. To open
or close the valves or bottle head, tap etc
2. To wind
up a clock.
3. To Move
the paddles of a bicycle
4. Turning a
key in lock for open and closing.
2 Couple Arm
The
perpendicular distance between the lines of action of the two and opposite
parallel forces is known as arm of the couple.
3 Moment of couple or couple moment
The
moment of the couple is the product of the force (one of the force of the two
equal and opposite parallel forces) and the arm of the couple. Mathematically
Moment of
couple = force x arm of couple Moment of couple = F x r
4 Direction of couple
The
direction and sense of a couple moment is determined using the right hand rule,
here the thumb indicates the direction when the fingers are curled with the
sense of rotation caused by the two forces.
5 Classification of Couple
The
couplet are classified as clockwise couple and anticlockwise couple
1. Clockwise couple
A couple
whose tendency is to rotate the body in a clockwise direction is known as
clockwise couple
2. Anticlockwise couple
A couple
whose tendency is to rotate the body in anticlockwise direction is known as
anticlockwise couple
Example 4: Determine the moment of couple acting on
the moment shown.
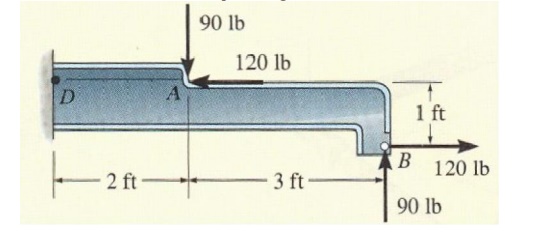
GivenF1=F2 =90lb F3 = F4 = 120lb.
Required Moment of couple = M=?
Solution The moment of couple can be
determined at any point for example
at A, B or D.
Let us
take the moment about point B
MB = Σ F
R.
MB = -F1
x r1 – F2 x r2 .
MB = -
90(3) – 120 (1)
MB = -
390 lb ft
Result MB = MA=MD =390 lb .ft counter clock wise.
Moment of couple = 390 lb.ft count clock wise
Related Topics