Chapter: Embedded Systems Design : Emulation and debugging techniques
Debugging techniques
Debugging techniques
The fundamental aim of a debugging methodology is to restrict the
introduction of untested software or hardware to a single item. This is good
practice and of benefit to the design and implementation of any system, even
those that use emula-tion early on in the design cycle.
It is to prevent this integration of two unknowns that simulation
programs to simulate and test software, hardware or both can play a critical
part in the development process.
High level language simulation
If software is written in a high level language, it is possible to test
large parts of it without the need for the hardware at all. Software that does
not need or use I/O or other system dependent facilities can be run and tested
on other machines, such as a PC or a engineering workstation. The advantage of
this is that it allows a parallel development of the hardware and software and
added confidence, when the two parts are integrated, that it will work.
Using this technique, it is possible to simulate I/O using the keyboard
as input or another task passing input data to the rest of the modules. Another
technique is to use a data table which contains data sequences that are used to
test the soft-ware.
This method is not without its restrictions. The most common mistake
with this method is the use of non-standard libraries which are not supported
by the target system com-piler or environment. If these libraries are used as
part of the code that will be transferred, as opposed to providing a user
interface or debugging facility, then the modifications needed to port the code
will devalue the benefit of the simulation.
The ideal is when the simulation system is using the same library
interface as the target. This can be achieved by using the target system or
operating system as the simulation system or using the same set of system
calls. Many operating systems support or provide a UNIX compatible library
which allows UNIX software to be ported using a simple recompilation. As a
result, UNIX systems are often employed in this simula-tion role. This is an
advantage which the POSIX compliant operating system Lynx offers.
This simulation allows logical testing of the software but rarely offers
quantitative information unless the simulation environment is very close to
that of the target, in terms of hardware and software environments.
Low level simulation
Using another system to simulate parts of the code is all well and good,
but what about low level code such as initiali-sation routines? There are
simulation tools available for these routines as well. CPU simulators can
simulate a processor, memory system and, in some cases, some peripherals and
allow low level assembler code and small HLL programs to be tested without the
need for the actual hardware. These tools tend to fall into two categories: the
first simulate the program-ming model and memory system and offer simple
debugging tools similar to those found with an onboard debugger. These are inevitably
slow, when compared to the real thing, and do not provide timing information or
permit different memory configurations to be tested. However, they are very
cheap and easy to use and can provide a low cost test bed for individuals
within a large software team. There are even shareware simu-lators for the most
common processors such as the one from the University of North Carolina which
simulates an MC68000 processor.
<D0> =00000000 <D4> =00000000 <A0> =00000000
<A4> =00000000 <D1> =00000000 <D5> =0000abcd <A1>
=00000000 <A5> =00000000 <D2> =00000000 <D6> =00000000
<A2> =00000000 <A6> =00000000 <D3> =00000000 <D7>
=00000000 <A3> =00000000 <A7> =00000000
trace: on sstep: on cycles: 416 <A7'>= 00000f00
cn tr st rc T S
INT XNZVC <PC> = 00000090
port1 00 00 82 00 SR = 1010101111011111
--------------------------------------------------
executing a ANDI instruction at
location 58
executing a ANDI instruction at
location 5e
executing a ANDI instruction at
location 62
executing a ANDI_TO_CCR instruction
at location 68
executing a ANDI_TO_SR instruction
at location 6c
executing a OR instruction at
location 70
executing a OR instruction at
location 72
executing a OR instruction at
location 76
executing a ORI instruction at
location 78
executing a ORI instruction at
location 7e
executing a ORI instruction at
location 82
executing a ORI_TO_CCR instruction
at location 88
executing a ORI_TO_SR instruction
at location 8c
TRACE exception occurred at
location 8c.
Execution halted
Example display from the University of North Carolina 68k simulator
The second category extends the simulation to provide timing information
based on the number of clock cycles. Some simulators can even provide
information on cache perform-ance, memory usage and so on, which is useful data
for making hardware decisions. Different performance memory systems can be
exercised using the simulator to provide performance data. This type of
information is virtually impossible to obtain without using such tools. These
more powerful simulators often require very powerful hosts with large amounts
of memory. SDS provide a suite of such tools that can simulate a processor and
memory and with some of the integrated proc-essors that are available, even
emulate onboard peripherals such as LCD controllers and parallel ports.
Simulation tools are becoming more and more impor-tant in providing
early experience of and data about a system before the hardware is available.
They can be a little impractical due to their performance limitations — one
second of process-ing with a 25 MHz RISC processor taking 2 hours of simulation
time was not uncommon a few years ago — but as workstation performance
improves, the simulation speed increases. With instruction level simulators it
is possible with a top of the range workstation to get simulation speeds of 1
to 2 MHz.
Onboard debugger
The onboard debugger provides a very low level method of debugging
software. Usually supplied as a set of EPROMs which are plugged into the board
or as a set of software routines that are combined with the applications code,
they use a serial connection to communicate with a PC or workstation. They
provide several functions: the first is to provide initialisa-tion code for the
processor and/or the board which will nor-mally initialise the hardware and
allow it to come up into a known state. The second is to supply basic debugging
facilities and, in some cases, allow simple access to the board’s periph-erals.
Often included in these facilities is the ability to download code using a serial
port or from a floppy disk.
>TR
PC=000404 SR=2000 SS=00A00000 US=00000000 X=0
A0=00000000 A1=000004AA A2=00000000 A3=00000000 N=0
A4=00000000 A5=00000000 A6=00000000 A7=00A00000 Z=0
D0=00000001 D1=00000013 D2=00000000 D3=00000000 V=0
D4=00000000 D5=00000000 D6=00000000 D7=00000000 C=0
---------->LEA $000004AA,A1
>TR
PC=00040A SR=2000 SS=00A00000 US=00000000 X=0
A0=00000000 A1=000004AA A2=00000000 A3=00000000 N=0
A4=00000000 A5=00000000 A6=00000000 A7=00A00000 Z=0
D0=00000001 D1=00000013 D2=00000000 D3=00000000 V=0
D4=00000000 D5=00000000 D6=00000000 D7=00000000 C=0
---------->MOVEQ #19,D1
>
Example display from an onboard M68000 debugger
When the board is powered up, the processor fetches its reset vector
from the table stored in EPROM and then starts to initialise the board. The
vector table is normally transferred from EPROM into a RAM area to allow it to
be modified, if needed. This can be done through hardware, where the EPROM
memory address is temporarily altered to be at the correct location for
power-on, but is moved elsewhere after the vector table has been copied.
Typically, a counter is used to determine a preset number of memory accesses,
after which it is assumed that the table has been transferred by the debugger
and the EPROM address can safely be changed.
The second method, which relies on processor support, allows the vector
table to be moved elsewhere in the memory map. With the later M68000
processors, this can also be done by changing the vector base register which is
part of the supervi-sor programming model.
The debugger usually operates at a very low level and allows basic
memory and processor register display and change, setting RAM-based breakpoints
and so on. This is normally performed using hexadecimal notation, although some
debuggers can provide a simple disassembler function. To get the best out of
these systems, it is important that a symbol table is generated when compiling
or linking software, which will provide a cross-reference between labels and
symbol names and their physical address in memory. In addition, an assem-bler
source listing which shows the assembler code generated for each line of C or
other high level language code is invalu-able. Without this information it can
be very difficult to use the debugger easily. Having said that, it is quite
frustrating having to look up references in very large tables and this
highlights one of the restrictions with this type of debugger.
While considered very low level and somewhat limited in their use,
onboard debuggers are extremely useful in giving confidence that the board is
working correctly and working on an embedded system where an emulator may be
impractical. However, this ability to access only at a low level can also place
severe limitations on what can be debugged.
The first problem concerns the initialisation routines and in particular
the processor’s vector table. Breakpoints use either a special breakpoint
instruction or an illegal instruction to generate a processor exception when
the instruction is executed. Program control is then transferred to the
debugger which displays the breakpoint and associated information. Similarly,
the debugger may use other vectors to drive the serial port that is connected
to the terminal.
This vector table may be overwritten by the initialisation routines of
the operating system which can replace them with its own set of vectors. The
breakpoint can still be set but when it is reached, the operating system will
see it instead of the debugger and not pass control back to it. The system will
normally crash because it is not expecting to see a breakpoint or an illegal
instruction!
To get around this problem, the operating system may need to be either
patched so that its initialisation routine writes the debugger vector into the
appropriate location or this must be done using the debugger itself. The
operating system is single stepped through its initialisation routine and the
in-struction that overwrites the vector simply skipped over, thus preserving
the debugger’s vector. Some operating systems can be configured to preserve the
debugger’s exception vectors, which removes the need to use the debugger to
preserve them.
A second issue is that of memory management where there can be a problem
with the address translation. Break-points will still work but the addresses
returned by the debugger will be physical, while those generated by the symbol
table will normally be logical. As a result, it can be very difficult to
reconcile the physical address information with the logical information.
The onboard debugger provides a simple but some-times essential way of
debugging VMEbus software. For small amounts of code, it is quite capable of
providing a method of debugging which is effective, albeit not as efficient as
a full blown symbolic level debugger — or as complex or expensive. It is often
the only way of finding out about a system which has hung or crashed.
Task level debugging
In many cases, the use of a low level debugger is not very efficient
compared with the type of control that may be needed. A low level debugger is
fine for setting a breakpoint at the start of a routine but it cannot set them
for particular task functions and operations. It is possible to set a
breakpoint at the start of the routine that sends a message, but if only a
particular message is required, the low level approach will need manual
inspection of all messages to isolate the one that is needed — an often
daunting and impractical approach!
To solve this problem, most operating systems provide a task level
debugger which works at the operating system level. Breakpoints can be set on
system circumstances, such as events, messages, interrupt routines and so on,
as well as the more normal memory address. In addition, the ability to filter
messages and events is often included. Data on the current executing tasks is
provided, such as memory usage, current status and a snapshot of the registers.
Symbolic debug
The ability to use high level language instructions, func-tions and
variables instead of the more normal addresses and their contents is known as
symbolic debugging. Instead of using an assembler listing to determine the
address of the first instruction of a C function and using this to set a
breakpoint, the symbolic debugger allows the breakpoint to be set by quoting a
line reference or the function name. This interaction is far more efficient
than working at the assembler level, although it does not necessarily mean
losing the ability to go down to this level if needed.
The reason for this is often due to the way that symbolic debuggers
work. In simple terms, they are intelligent front ends for assembler level
debuggers, where software performs the automatic look-up and conversion between
high level language structures and their respective assembler level ad-dresses
and contents.
12
int prime,count,iter;
13
14
for (iter = 1;iter<=MAX_ITER;iter++)
15
{
16
count = 0;
17
for(i = 0; i<MAX_PRIME; i++)
18
flags[i] = 1;
19
for(i = 0; i<MAX_PRIME; i++)
20
if(flags[i])
21
{
22
prime = i + i + 3;
23
k = i + prime;
24
while (k < MAX_PRIME)
25
{
26
flags[k] = 0;
27
k += prime;
28
}
29
count++;
Source code listing with line references
000100AA 7C01 MOVEQ #$1,D6
000100AC 7800 MOVEQ #$0,D4
000100AE 7400 MOVEQ #$0,D2
000100B0 207C 0001 2148 MOVEA.L #$12148,A0 000100B6
11BC 0001 2000 MOVE.B #$1,($0,A0,D2.W)
000100BC 5282 ADDQ.L #$1,D2
000100BE 7011 MOVEQ #$11,D0
000100C0 B082 CMP.L D2,D0
000100C2 6EEC BGT.B $100B0
000100C4 7400 MOVEQ #$0,D2 000100C6 207C 0001 2148
MOVEA.L #$12148,A0 000100CC 4A30 2000 TST.B ($0,A0,D2.W) 000100D0 6732
BEQ.B $10104 000100D2 2A02 MOVE.L D2,D5 000100D4 DA82 ADD.L D2,D5 000100D6 5685
ADDQ.L #$3,D5
Assembler listing
›>>
12 int prime,count,iter; ›>> 13
›—
14 => for (iter = 1;<=iter<=MAX_ITER;iter++)
›
000100AA
7C01 MOVEQ #$1,D6
›>>
15 {
›>>
16 count = 0;
›
000100AC
7800 MOVEQ #$0,D4
›—
17 => for(i = 0;<= i<MAX_PRIME; i++)› > 000100AE 7400 MOVEQ
#$0,D2
›>>
18 flags[i] = 1;
›
000100B0
207C 0001 2148 MOVEA.L #$12148,A0 {flags}
›
000100B6
11BC 0001 2000 MOVE.B #$1,($0,A0,D2.W)
›—
17 for(i = 0; i<MAX_PRIME; => i++)<=
› 000100BC 5282 ADDQ.L #$1,D2
›—
17 for(i = 0; => i<MAX_PRIME;<=i++)
›
000100BE
7011 MOVEQ #$11,D0
›
000100C0
B082 CMP.L D2,D0
›
000100C2
6EEC BGT.B $100B0
Assembler listing with symbolic information
The key to this is the creation of a symbol table which provides the
cross-referencing information that is needed. This can either be included
within the binary file format used for object and absolute files or, in some
cases, stored as a separate file. The important thing to remember is that
symbol tables are often not automatically created and, without them, symbolic
debug is not possible.
When the file or files are loaded or activated by the debugger, it
searches for the symbolic information which is used to display more meaningful
information as shown in the various listings. The symbolic information means
that break-points can be set on language statements as well as individual
addresses. Similarly, the code can be traced or stepped through line by line or
instruction by instruction.
This has several repercussions. The first is the number of symbolic
terms and the storage they require. Large tables can dramatically increase file
size and this can pose constraints on linker operation when building an
application or a new version of an operating system. If the linker has
insufficient space to store the symbol tables while they are being corrected —
they are often held in RAM for faster searching and update — the linker may
crash with a symbol table overflow error. The solution is to strip out the
symbol tables from some of the modules by recompiling them with symbolic
debugging disa-bled or by allocating more storage space to the linker.
The problems may not stop there. If the module is then embedded into a
target and symbolic debugging is required, the appropriate symbol tables must
be included in the build and this takes up memory space. It is not uncommon for
the symbol tables to take up more space than the spare system memory and
prevent the system or task from being built or running correctly. The solution
is to add more memory or strip out the symbol tables from some of the modules.
It is normal practice to remove all the symbol table information from
the final build to save space. If this is done, it will also remove the ability
to debug using the symbol informa-tion. It is a good idea to have at least a
hard copy of the symbol table to help should any debugging be needed.
Emulation
Even using the described techniques, it cannot be stated that there will
never be a need for additional help. There will be times when instrumentation,
such as emulation and logic analysis, are necessary to resolve problems within
a design quickly. Timing and intermittent problems cannot be easily solved
without access to further information about the proces-sor and other system
signals. Even so, the recognition of a potential problem source, such as a
specific software module or hardware, allows more productive use and a speedier
resolu-tion. The adoption of a methodical design approach and the use of ready
built boards as the final system, at best remove the need for emulation and, at
worst, reduce the amount of time required to debug the system.
There are some problems with using emulation within a board-based system
or any rack mounted system. The first is how to get the emulation or logic
analysis probe onto the board in the first place. Often the gap between the
processor and adjacent boards is too small to cope with the height of the
probe. It may be possible to move adjacent boards to other slots, but this can
be very difficult or impossible in densely populated racks. The answer is to
use an extender board to move the target board out of the rack for easier
access. Another problem is the lack of a socketed processor chip which
effec-tively prevents the CPU from being removed and the emulator probe from
being plugged in. With the move towards surface mount and high pin count
packages, this problem is likely to increase. If you are designing your own
board, I would recom-mend that sockets are used for the processor to allow an
emulator to be used. If possible, and the board space allows it, use a zero
insertion force socket. Even with low insertion force sockets, the high pin
count can make the insertion force quite large. One option that can be used,
but only if the hardware has been designed to do so, is to leave the existing
processor in situ and tri-state all
its external signals. The emulator is then connected to the processor bus via
another connector or socket and takes over the processor board.
The second problem is the effect that large probes can have on the
design especially where high speed buses are used. Large probes and the
associated cabling create a lot of addi-tional capacitance loading which can
prevent an otherwise sound electronic design from working. As a result, the
system speed very often must be downgraded to compensate. This means that the
emulator can only work with a slower than originally specified design. If there
is a timing problem that only appears while the system is running at high speed,
then the emulator is next to useless in providing any help. We will come back
to emulation techniques at the end of this chapter.
Optimisation problems
The difficulties do not stop with hardware mechanical problems. Software
debugging can be confused or hampered by optimisation techniques used by the
compiler to improve the efficiency of the code. Usually set by options from the
command line, the optimisation routines examine the code and change it to
improve its efficiency, while retaining its logical design and context. Many
different techniques are used but they fall into two main types: those that
remove code and those that add code or change it. A compiler may remove
variables or routines that are never used or do not return any function. Small
loops may be unrolled into straight line code to remove branching delays at the
expense of a slightly larger program. Floating point routines may be replaced
by inline floating point instructions. The net result is code that is different
from the assembler listing produced by the compiler. In addition, the generated
symbol table may be radically different from that expected from the source
code.
These optimisation techniques can be ruthless; I have known whole
routines to be removed and in one case a com-plete program was reduced to a
single NOP instruction! The program was a set of functions that performed
benchmark routines but did not use any global information or return any values.
The optimiser saw this and decided that as no data was passed to it and it did
not modify or return any global data, it effectively did nothing and replaced
it with a NOP. When benchmarked, it gave a pretty impressive performance of
zero seconds to execute several million calculations.
/* sieve.c — Eratosthenes Sieve prime number calculation */
/* scaled down with MAX_PRIME set to 17 instead of 8091 */
#define MAX_ITER 1
#define MAX_PRIME 17
char flags[MAX_PRIME];
main ()
{
register int i,k,l,m; int prime,count,iter;
for (iter = 1;iter<=MAX_ITER;iter++)
{
count = 0;
/* redundant code added here */
for(l = 0; l < 200; l++ ); for(m = 128; l > 1; m— );
/* redundant code ends here */
for(i = 0; i<MAX_PRIME; i++) flags[i] = 1;
for(i = 0; i<MAX_PRIME; i++) if(flags[i])
{
prime = i + i + 3; k = i + prime;
while (k < MAX_PRIME)
{
flags[k] = 0; k += prime;
}
count++;
printf(“ prime %d =
%d\n”, count, prime);
}
}
printf(“\n%d primes\n”,count);
}
Source listing for optimisation example
file "ctm1AAAa00360" file "ctm1AAAa00355"
def aut1.,32 def aut1.,32
def arg1.,64 def arg1.,56
text text
global _main global _main
_main: _main:
subu r31,r31,arg1. subu r31,r31,arg1.
st r1,r31,arg1.-4 st r1,r31,arg1.-4
st r19,r31,aut1.+0 st.d r20,r31,aut1.+0
st r20,r31,aut1.+4 st.d r22,r31,aut1.+8
st r21,r31,aut1.+8 st r25,r31,aut1.+16
st r22,r31,aut1.+12 or r20,r0,1
st r23,r31,aut1.+16 @L26:
st r24,r31,aut1.+20 or r21,r0,r0
st r25,r31,aut1.+24 or r25,r0,r0
or r19,r0,1 @L7:
br @L25 addu r25,r25,1
@L26: cmp r13,r25,200
or r20,r0,r0 bb1 lt,r13,@L7
or r23,r0,r0 br.n @L28
br @L6 or r2,r0,128
@L7: @L11:
addu r23,r23,1 subu r2,r2,1
@L6: @L28:
cmp r13,r23,200 cmp r13,r25,1
bb1 lt,r13,@L7 bb1 gt,r13,@L11
or r22,r0,128 or r25,r0,r0
br @L10 or.u r22,r0,hi16(_flags)
@L11: or r22,r22,lo16(_flags)
subu r22,r22,1 @L15:
@L10: or r13,r0,1
cmp r13,r23,1 st.b r13,r22,r25
bb1 gt,r13,@L11 addu r25,r25,1
or r25,r0,r0 cmp r12,r25,17
br @L14 bb1 lt,r12,@L15
@L15: or r25,r0,r0
or.u r13,r0,hi16(_flags) @L24:
or r13,r13,lo16(_flags) ld.b r12,r22,r25
or r12,r0,1 bcnd eq0,r12,@L17
st.b r12,r13,r25 addu r12,r25,r25
addu r25,r25,1 addu r23,r12,3
@L14: addu r2,r25,r23
cmp r13,r25,17 cmp r12,r2,17
bb1 lt,r13,@L15 bb1 ge,r12,@L18
or r25,r0,r0 @L20:
br @L23 st.b r0,r22,r2
@L24: addu r2,r2,r23
or.u r13,r0,hi16(_flags) cmp r13,r2,17
or r13,r13,lo16(_flags) bb1 lt,r13,@L20
ld.b r13,r13,r25 @L18:
bcnd eq0,r13,@L17 addu r21,r21,1
addu r13,r25,r25 or.u r2,r0,hi16(@L21)
addu r21,r13,3 or r2,r2,lo16(@L21)
addu r24,r25,r21 or r3,r0,r21
br @L19 bsr.n _printf
@L20: or r4,r0,r23
or.u r13,r0,hi16(_flags) @L17:
or r13,r13,lo16(_flags) addu r25,r25,1
st.b r0,r13,r24 cmp r13,r25,17
addu r24,r24,r21 bb1 lt,r13,@L24
@L19: addu r20,r20,1
cmp r13,r24,17 cmp r13,r20,1
bb1 lt,r13,@L20 bb1 le,r13,@L26
addu r20,r20,1 or.u r2,r0,hi16(@L27)
or.u r2,r0,hi16(@L21) or r2,r2,lo16(@L27)
or r2,r2,lo16(@L21) bsr.n _printf
or r3,r0,r20 or r3,r0,r21
or r4,r0,r21 ld.d r20,r31,aut1.+0
bsr _printf ld r1,r31,arg1.-4
@L17: ld.d r22,r31,aut1.+8
addu r25,r25,1 ld r25,r31,aut1.+16
@L23: jmp.n r1
cmp r13,r25,17 addu r31,r31,arg1.
bb1 lt,r13,@L24
addu r19,r19,1
@L25:
cmp r13,r19,1
bb1 le,r13,@L26
or.u r2,r0,hi16(@L27)
or r2,r2,lo16(@L27)
or r3,r0,r20
bsr _printf
ld r19,r31,aut1.+0
ld r20,r31,aut1.+4
ld r21,r31,aut1.+8
ld r22,r31,aut1.+12
ld r23,r31,aut1.+16
ld r24,r31,aut1.+20
ld r25,r31,aut1.+24
ld r1,r31,arg1.-4
addu r31,r31,arg1.
jmp r1
No optimisation Full
optimisation
Assembler listings for optimised and non-optimised compilation
To highlight how optimisation can dramatically change the generated code
structure, look at the C source listing for the Eratosthenes Sieve program and
the resulting M88000 assem-bler listings that were generated by using the
default non-optimised setting and the full optimisation option. The imme-diate
difference is in the greatly reduced size of the code and the use of the .n
suffix with jump and branch instructions to make use of the delay slot. This is
a technique used on many RISC processors to prevent a pipeline stall when
changing the program flow. If the instruction has a .n suffix, the instruction
immediately after it is effectively executed with the branch and not after it,
as it might appear from the listing!
In addition, the looping structures have been reorgan-ised to make them
more efficient, although the redundant code loops could be encoded simply as a
loop with a single branch. If the optimiser is that good, why has it not done
this? The reason is that the compiler expects loops to be inserted for a reason
and usually some form of work is done within the loop which may change the loop
variables. Thus the compiler will take the general case and use that rather
than completely remove it or rewrite it. If the loop had been present in a dead
code area — within a conditional statement where the condi-tions would never be
met — the compiler would remove the structure completely.
The initialisation routine _main is different in that not all the variables are initialised using a
store instruction and fetching their values from a stack. The optimised version
uses the faster ‘or’ instruction to set some of the variables to zero.
These and other changes highlight several problems with optimisation.
The obvious one is with debugging the code. With the changes to the code, the
assembler listing and symbol tables do not match. Where the symbols have been
preserved, the code may have dramatically changed. Where the routines have been
removed, the symbols and references may not be present. There are several
solutions to this. The first is to debug the code with optimisation switched
off. This preserves the symbol references but the code will not run at the same
speed as the optimised version, and this can lead to some timing problems. A
second solution is becoming available from compiler and debugger suppliers,
where the optimisation techniques preserve as much of the symbolic information
as possible so that function addresses and so on are not lost.
The second issue is concerned with the effect optimisation may have on
memory mapped I/O. Unless the optimiser can recognise that a function is
dealing with memory mapped I/O, it may not realise that the function is doing
some work after all and remove it — with disastrous results. This may require
declaring the I/O addresses as a global variable, returning a value at the
function’s completion or even passing the address to the function itself, so
that the optimiser can recognise its true role. A third complication can arise
with optimisations such as unrolling loops and software timing. It is not
uncommon to use instruction sequences to delay certain accesses or functions. A
peripheral may require a certain number of clock cycles to respond to a
command. This delay can be accomplished by executing other instructions, such
as a loop or a divide instruc-tion. The optimiser may remove or unroll such
loops and replace the inefficient divide instruction with a logical shift.
While this does increase the performance, that is not what was required and the
delayed peripheral access may not be long enough — again with disastrous
results.
Such software timing should be discouraged not only for this but also
for portability reasons. The timing will assume certain characteristics about
the processor in terms of process-ing speed and performance which may not be
consistent with other faster board designs or different processor versions.
Xray
It is not uncommon to use all the debugging techniques that have been
described so far at various stages of a develop-ment. While this itself is not
a problem, it has been difficult to get a common set of tools that would allow
the various tech-niques to be used without having to change compilers or
libraries, learn different command sets, and so on. The ideal would be a single
set of compiler and debugger tools that would work with a simulator, task level
debugger, onboard debugger and emulator. This is exactly the idea behind
Microtec’s Xray product.
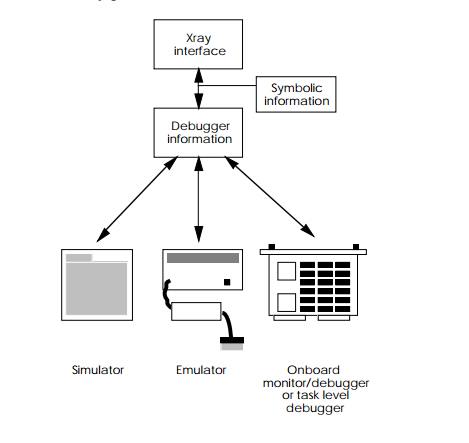
Xray consists of a consistent debugger system that can interface with a
simulator, emulator, onboard debugger or operating system task level debugger.
It provides a consistent interface which greatly improves the overall
productivity be-cause there is no relearning required when moving from one
environment to another. It obtains its debugging information from a variety of
sources, depending on how the target is being accessed. With the simulator, the
information is accessed di-rectly. With an emulator or target hardware, the
link is via a simple serial line, via the Ethernet or directly across a shared
memory interface. The data is then used in conjunction with symbolic
information to produce the data that the user can see and control on the host
machine.
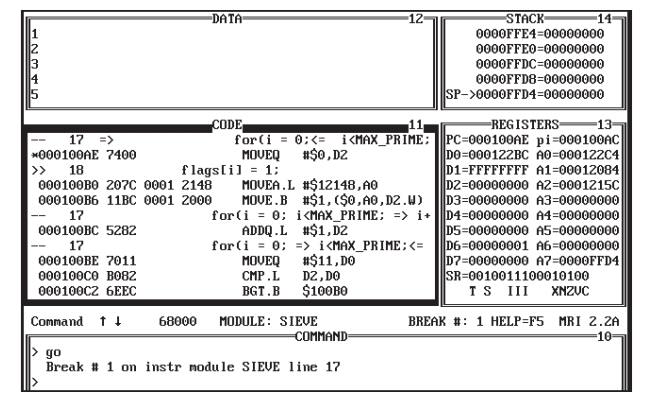
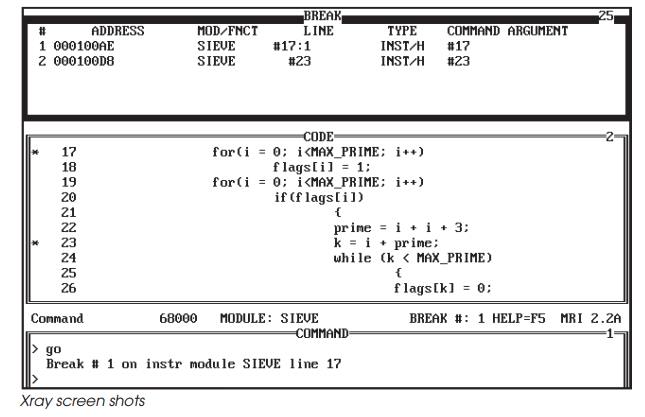
The interface consists of a number of windows which display the
debugging information. The windows consist of two types: those that provide core
information, such as break-points and the processor registers and status. The
second type are windows concerned with the different environments, such as task
level information. Windows can be chosen and dis-played at the touch of a key.
The displays are also consistent over a range of hosts, such as Sun
workstations, IBM PCs and UNIX platforms. Either a serial or network link is
used to transfer information from the target to the debugger. The one exception
is that of the simulator which runs totally on the host system.
So how are these tools used? Xray comes with a set of compiler tools
which allows software to be developed on a host system. This system does not
have to use the same processor as the target. To execute the code, there is a
variety of choices. The simulator is ideal for debugging code at a very early
stage, before hardware is available, and allows software develop-ment to
proceed in parallel with hardware development. Once the hardware is available,
the Xray interface can be taken into the target through the use of an emulator
or a small onboard debug monitor program. These debug monitors are supplied as
part of the Xray package for a particular processor. They can be easily
modified to reflect individual memory maps and have drivers from a large range
of serial communications peripherals.
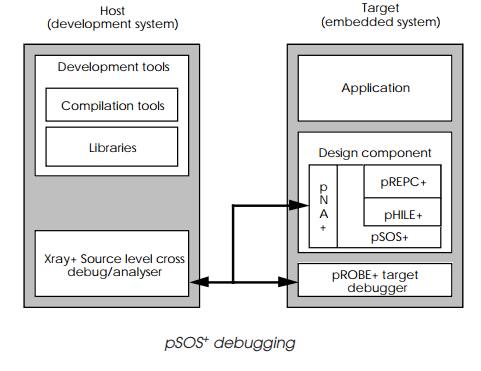
With Xray running in the target, the hardware and initial software
routines can be debugged. The power of Xray can be further extended by having
an Xray interface from the operating system debugger. pSOS+ uses this method to provide its
debugging interface. This allows task level information to be used to set
breakpoints, and so on, while still preserving the lower level facilities. This
provides an extremely powerful and flexible way of debugging a target system.
Xray has become a de facto standard
for debugging tools within the real-time and
VMEbus market. This type of approach is also being adopted by many other
software suppliers.
Related Topics