Chapter: Mechanical : Finite Element Analysis : Applications in Heat Transfer & Fluid Mechanics
Applications in Heat Transfer & Fluid Mechanics
APPLICATIONS IN HEAT TRANSFER &FLUID MECHANICS
ONE DIMENSIONAL HEAT TRANSFER ELEMENT
In structural problem
displacement at each nodel point is obtained. By using these displacement
solutions, stresses and strains are calculated for each element. In structural
problems, the unknowns are represented by the components of vector field. For
example, in a two dimensional plate, the unknown quantity is the vector field
u(x,y),where u is a (2x1)displacement vector.
Heat transfer can be defined as
the transmission of energy from one region another region due to temperature
difference. A knowledge of the temperature distribution within a body is important
in many engineering problems. There are three modes of heat transfer.
They are: (i) Conduction
(ii) Convection
(iii)Radiation
1Strong Form for Heat Conduction in One Dimension
with Arbitrary Boundary Conditions
Following
the same procedure as in Section, the portion of the boundary where the
temperature is prescribed, i.e. the essential boundary is denoted by T and the boundary where the flux is
prescribed is recommended for Science and
Engineering Track. Denoted by q ; these
are the boundaries with
natural boundary conditions. These boundaries
are complementary, so
With the unit normal used in , we can express
the natural boundary condition as qn ¼ q. For example, positive flux q
causes heat inflow (negative q ) on the left boundary point where
qn ¼ q ¼ q and heat outflow (positive q ) on the right boundary point where qn
¼ q ¼ q.
![]()
Strong
form for 1D heat conduction problems
2Weak Form for Heat Conduction in
One Dimension with Arbitrary Boundary Conditions
We again multiply the first two
equations in the strong form by the weight function and integrate over the
domains over which they hold, the domain for the differential equation and the
domain q for the flux boundary condition, which
yields ws
dx with w ¼
T and
combining with gives
Recalling that w ¼ 0 on
Weak form
for 1D heat conduction problems
Find T
ðxÞ 2 U such that
Notice the similarity between
APPLICATION TO HEAT TRANSFER TWO-DIMENTIONAL
1Strong
Form for Two-Point Boundary Value
Problems
The equations developed in this
chapter for heat conduction, diffusion and elasticity problems are all of the
following form:
Such
one-dimensional problems are called two-point boundary value problems. gives
the particular meanings of the above variables and parameters for several
applications. The natural boundary conditions can also be generalized as (based
on Becker et al. (1981))
Equation
is a natural boundary condition because the derivative of the solution appears
in it. reduces to the standard natural boundary conditions considered in the
previous sections when bðx Þ ¼ 0. Notice that the essential boundary condition
can be recovered as a limiting case of when bðxÞ is a penalty parameter, i.e. a
large number In this case, and Equation is
called a generalized boundary condition.
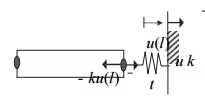
An
example of the above generalized boundary condition is an elastic bar with a spring attached as shown in In this case,
bðlÞ ¼ k and reduces to

where ¼ k is the spring
constant. If the spring stiffness is set to a very large value, the above
boundary condition enforces ¼ u; if we let k ¼ 0, the above boundary condition
corresponds to a prescribed traction boundary. In practice, such generalized
boundary conditions are often used to model the influence of the surroundings.
For example, if the bar is a simplified model of a building and its foundation,
the spring can represent the stiffness of the soil.
2 Two-Point Boundary Value Problem With Generalized
Boundary Conditions
An
example of the generalized boundary for elasticity problem.
Another example of the application of this boundary condition
is convective heat transfer, where energy is transferred between the
surface of the wall and the surrounding medium. Suppose convective heat
transfer occurs at x ¼ l. Let T ðlÞ be the wall temperature at x ¼ l and T be the temperature in the medium. Then the flux at the boundary x
¼ l is given by qð lÞ ¼ hðT ðlÞ T Þ, so bðlÞ ¼
h and the boundary condition is
where h is convection coefficient, which has dimensions of W m 2 o C 1 . Note that when the convection
coefficient is very large, the temperature T is immediately felt at x ¼ l and
thus the essential boundary condition is again enforced as a limiting case of
the natural boundary condition.
There are two approaches to deal with the boundary
condition . We will call them the penalty and partition methods. In the penalty
method, the essential boundary condition is enforced as a limiting case of the
natural boundary condition by equating bðxÞ to a penalty parameter. The
resulting strong form for the penalty method is given in.
General
strong form for 1D problems-penalty method
þ f
¼ 0
on ;
In the partition approach, the total boundary is
partitioned into the natural boundary, and the complementary essential
boundary, The natural boundary condition has the generalized form defined by
The resulting strong form for the partition method is summarized in.
3
Weak Form
for Two-Point Boundary Value Problems
In this section, we will derive the general weak
form for two-point boundary value problems. Both the penalty and partition
methods described in will be considered. To obtain the general weak form for
the penalty method, we multiply the two equations in the strong by the weight
function and integrate over the domains over which they hold: the domain for
the differential equation and the domain for the generalized boundary
condition.
SCALE VARIABLE PROBLEM IN 2 DIMENSIONS
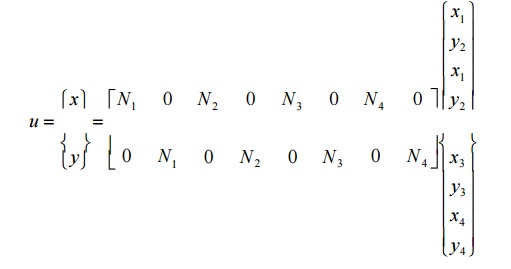
Ø Equation of Stiffness Matrix for 4 noded
isoparametric quadrilateral element
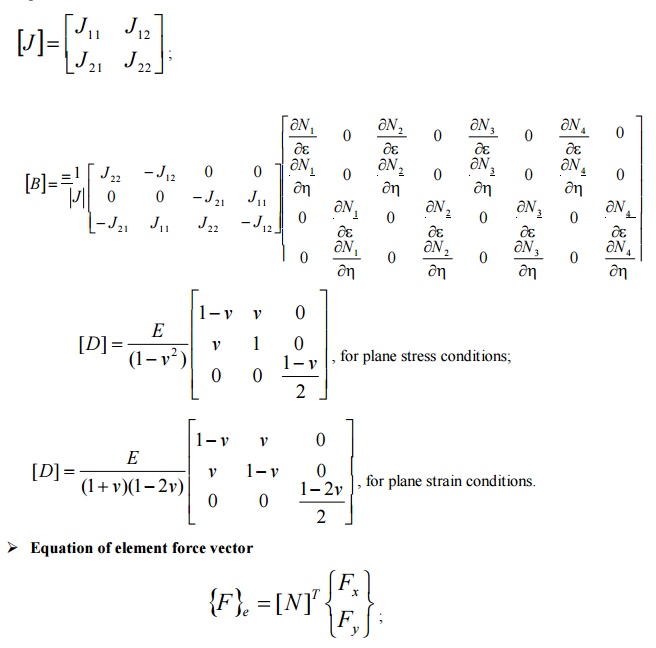
N –Shape function,
Fx –load or force along x direction,
Fy –load or
force along y direction.
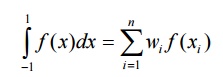
Ø Numerical
Integration (Gaussian Quadrature)
The Gauss
quadrature is one of the numerical integration methods to calculate the
definite integrals. In FEA, this Gauss quadrature method is mostly preferred.
In this method the numerical integration is achieved by the following
expression,
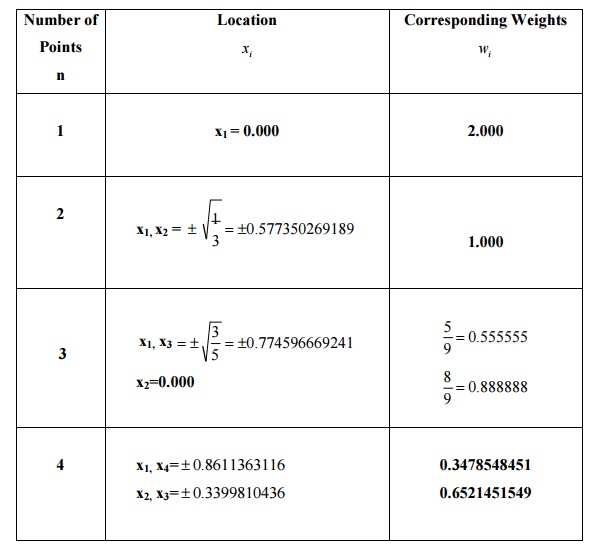
Table
gives gauss points for integration from -1 to 1.
Ø Problem (I set)
1. Evaluate 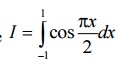 by applying 3 point Gaussian quadrature and compare with exact
solution.
by applying 3 point Gaussian quadrature and compare with exact
solution.
2. 2. Evaluate 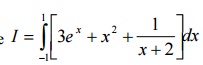 using one point and two point Gaussian quadrature. Compare
with exact solution.
using one point and two point Gaussian quadrature. Compare
with exact solution.
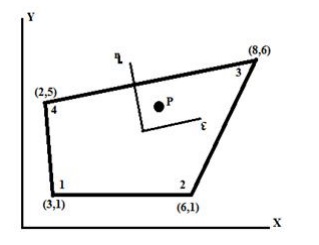
3. 3. For
the isoparametric quadrilateral element shown in figure, determine the local co
–ordinates
of the point P which has Cartesian co-ordinates (7, 4).
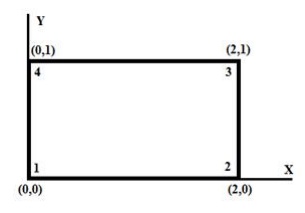
4. A four noded rectangular element is in
figure. Determine (i) Jacobian
matrix, (ii) Strain
–
Displacement matrix and
(iii) Element Stresses.
Take
E=2x105N/mm2,υ= 0.25,u=[0,0,0.003,0.004,0.006,.004,0,0]T,
Ɛ= 0, ɳ=0.
Assume
plane stress condition.
2 DIMENTIONAL FLUID MECHANICS
The
problem of linear elastostatics described in detail in can be extended to
include the effects of inertia. The resulting equations of motion take the form
where
u = u(x1 , x2, x3 , t) is the unknown displacement field, ρ is the mass
density, and I = (0, T ) with T being a given ti me. Also, u0 and v0 are the prescribed initi al
displacement and velocity fields.
Clearly, two sets
of boundary conditions are
set on Γu
and Γq , respectively, and are assumed to hold
throughout the time interval I . Likew ise, two sets of initial conditions are
set for the whole domain Ω at time t = 0. The stron g form of the resulting initial/boundary- value problem is
stated as follows: given functions f , t, u¯ , u0 and v0, as well as a
constitutive equation for σ, find u in Ω × I , such that the equations are
satisfied.
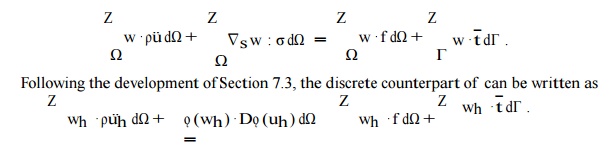
A
Galerkin-based weak form of the linear elastostatics problem has been derived
in Sec-tion In the elastodynamics case, the only substantial difference
involves the inclusion of the term RΩ w • ρu¨ dΩ, as long as one adopts the
semi-discrete approach. As a result, the
weak form at a fixed time can be expressed as
Following a standard proced ure, the contribution of the
forcing vector Fi nt,e due to interele- ment tractions is neglected
upon assembly of the global equations . As a result, the equations is give rise
to their assembled counterparts in the form
Mu + Kuˆ = F ,
where uˆ is the global unknown
displacement vector1 . The preceding equat ions are, of course,
subject to initial conditions t hat can be written in vectorial form as uˆ(0) = uˆ0 and vˆ(0) = vˆ0
The most commonly emp loyed method for the
numerical solution of t he system of
coupled linear second-order ordi nary differential equations is the Newmark m
ethod. This
method is based
on a time series expansion of ˆu
and ˆ u˙ := v.ˆ Concentrating on the time interval (tn
,tn+1], the New mark method is defined by the equations

It is
clear that the Newmark equations define
a whole family of time inte grators.
It is important to distinguish this family into two
categories, namely implicit and explicit integrators, corresponding to β > 0
and β = 0,
respectively.
The overhead “hat” symbol
is used to distinguish between the vector field u and the solution vector uˆemanating
fr om the finite element approximation of the vector field u.
The general implicit Newmar k
integration method may be implemented as follows: first, solve (9.18)1
for aˆn+1 , namely
write

Then, substitute (9.19)
into the semi-discrete form (9.17) evaluated at tn+1 to find that

After solving for uˆn+1, one ma
y compute the acceleration aˆn+1 from and
the velocity vˆn+1 from.
Finally, the general explicit N ewmark integration method may
be implemented as follows: starting from the semi-discrete e quations evaluated
at tn+1, one may substitute uˆn+1from to
find that

If M is
rendered diagonal (see discussion in our pages ), then aˆn+1 can be
determined without solving any
coupled linear algebraic
equations. Then, ˆ are the
velocities bvn+1 immediately computed
from (9. 18)2. Also, the
displacements uˆ n+1 are computed from indepen-dently of the acceleratio ns
aˆn+1 .
Related Topics