Chapter: Solid State Drives : Design of Controllers For Drives
Speed Controller
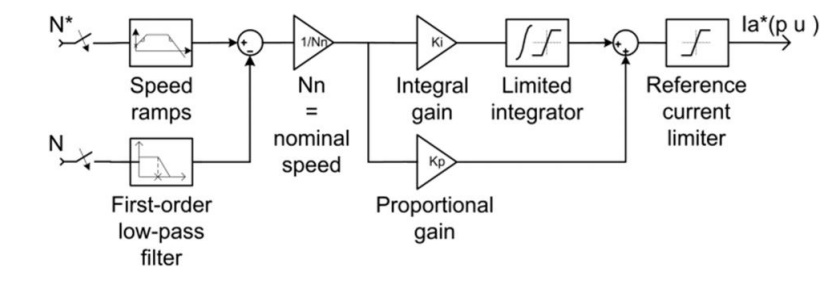
The speed regulator in the following figure uses a PI controller. The controller outputs the armature current reference (in pu) used by the current controller in order to obtain the electromagnetic torque needed to reach the desired speed.
Speed
Controller
The speed regulator in the following figure uses a
PI controller. The controller outputs the armature current reference (in pu)
used by the current controller in order to obtain the electromagnetic torque
needed to reach the desired speed. During torque regulation, the speed
controller is disabled.
The
controller takes the speed reference (in rpm) and the rotor speed of the DC
machine as inputs. The speed reference change rate will follow user-defined
acceleration and deceleration ramps in order to avoid sudden reference changes
that could cause armature over-current and destabilize the system. The speed
measurement is filtered by a first-order low-pass filter.
Study Material, Lecturing Notes, Assignment, Reference, Wiki description explanation, brief detail
Solid State Drives : Design of Controllers For Drives : Speed Controller |
Related Topics
Solid State Drives : Design of Controllers For Drives