Chapter: Solid State Drives : Design of Controllers For Drives
Current Controller
Current
Controller
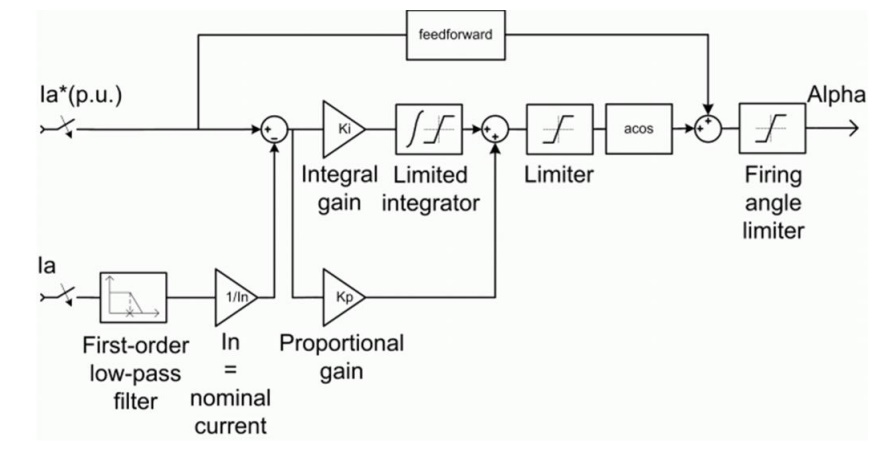
The
armature current regulator in the following figure is based on a second PI
controller. The regulator controls the armature current by computing the
appropriate thyristor firing angle. This generates the rectifier output voltage
needed to obtain the desired armature current and thus the desired
electromagnetic torque.
The
controller takes the current reference (in pu) and the armature current flowing
through the motor as inputs. The current reference is either provided by the
speed controller during speed regulation or computed from the torque reference
provided by the user during torque regulation. This is managed by the
"regulation switch" block.
The
armature current input is filtered by a first-order low-pass filter. An
arccosine function is used to linearize the control system during continuous
conduction. To compensate nonlinearities appearing during discontinuous
conduction, a feed forward term is added to the firing angle.
Related Topics